



Brazo Robótico de 4 Servomotores
El Brazo Robótico de 4 Servomotores es un manipulador que contiene 4 servomotores sg90 o 4 servomotores mg90s, de tamaño educativo y de Código Abierto, manipulable con cualquier placa que maneje servomotores básicos.
En la siguiente guía encontrarás todos los pasos necesarios para controlar tu Brazo Robótico de 4 Servomotores utilizando una computadora, el Arduino IDE y el monitor serial. Enviaremos varias letras del teclado a través del monitor serial, de modo que cada letra moverá un motor hacia la derecha o la izquierda, permitiéndonos controlar todo el brazo con el teclado.
Recomendaciones Iniciales
Antes de empezar con esta guía, asegúrate de desconectar el pin conector del servomotor de la Garra. Si la Garra está conectada y cerrada, el servomotor podría forzarse y quemarse.
Para evitar problemas, primero calibra la Garra:
- Cuando la Garra está completamente abierta, debería estar a 0 grados.
- Cuando la Garra está completamente cerrada, debería estar entre 40 y 50 grados.
Si la Garra está cerrada a más de 50 grados, estará aplicando demasiada fuerza, lo que podría forzar el servomotor y dañarlo si se mantiene en ese estado por mucho tiempo. Así que ajusta cuidadosamente para proteger tu equipo.
Si deseas saber el Ángulo del servomotor, te recomendamos seguir la siguiente guía:
→ Cómo Probar Servomotores con ArduinoMateriales Necesarios:
Brazo Robotico MeArm Kit Negro
Arduino Uno R3 + Cable de Datos

Jumpers Dupont M-M 10cm x 40 Und

Protoboard Mini 170 Puntos
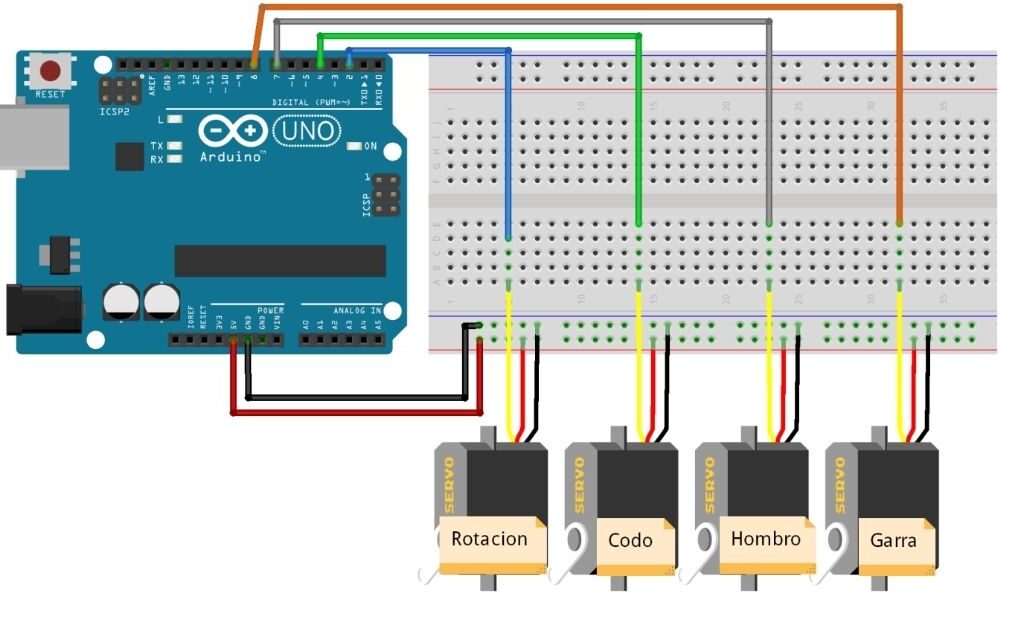
Esquema Electrónico
Deberás seguir el siguiente esquema electrónico para tu manipulador robótico. Si compraste un kit completo, verifica que los pines de conexión del Arduino a tus servomotores estén correctos:
Control por Monitor Serial
Sigue estos pasos para controlar tu brazo robótico utilizando el monitor serial de Arduino IDE:
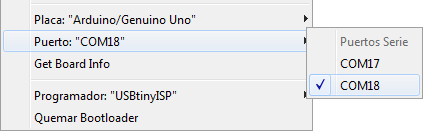
Paso 1: Selección de la Placa y el Puerto
En el apartado “Herramientas” del Arduino IDE, selecciona la opción “Placa” y escoge “Arduino/Genuino Uno”. Luego, en la opción “Puerto”, elige el puerto COM al que está conectado tu módulo bluetooth al PC.

Generalmente, este será el segundo puerto COM de conexión bluetooth, diferente del puerto COM que usaste para conectar tu Arduino UNO por puerto serial y cargar los códigos en los pasos anteriores.
Paso 2: Iniciar el Monitor Serial
Inicia el Monitor Serial que está incorporado en tu IDE de Arduino. Esto te permitirá enviar comandos a tu brazo robótico y ver las respuestas en tiempo real.

Paso 3: Enviar Comandos en el Monitor Serial
En el Monitor Serial podrás enviar comandos y visualizar en qué grado se encuentran los servomotores:
| Tecla | Acción |
|---|---|
| a | + Rotación |
| s | – Rotación |
| e | + Hombro |
| d | – Hombro |
| r | + Codo |
| f | – Codo |
| z | + Garra |
| x | – Garra |