



Mover Brazo Robótico Kimo desde Matlab
Utilizando Matrices
¡Bienvenido al emocionante mundo de la robótica y la programación! En esta guía, te sumergirás en el fascinante proceso de controlar el brazo robótico Kimo Mini, equipado con 6 servomotores SG90, utilizando la potencia de Matlab y un Arduino Uno.
Prepárate para un viaje lleno de aprendizaje mientras exploramos cómo interactuar con este robot utilizando herramientas líderes en la industria.
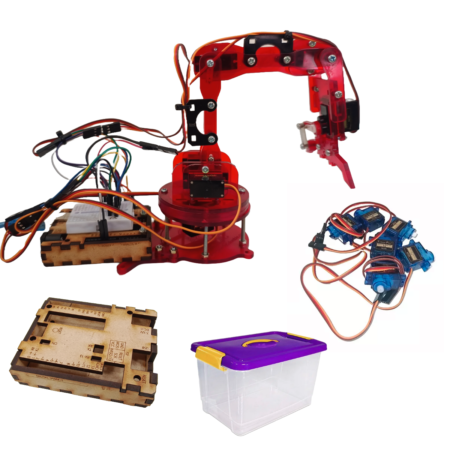
Materiales Necesarios:
Brazo Robótico Kimo con Servomotores – Rojo
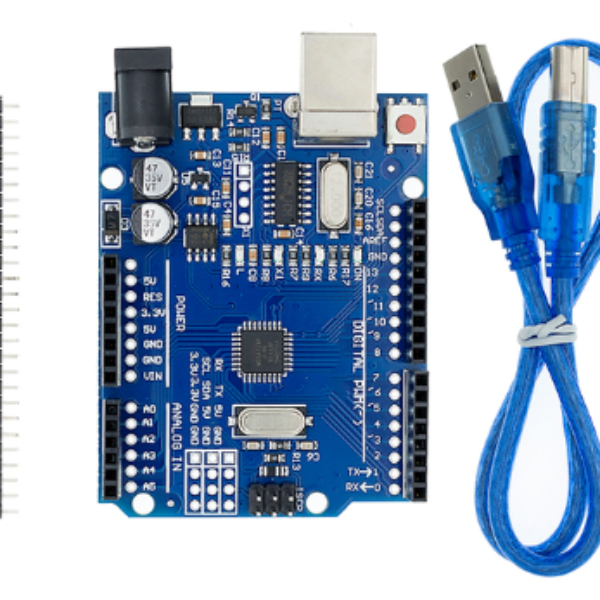
ARDUINO UNO R3 + CABLE DE DATOS

Protoboard Mini 170 Puntos

Adaptador Fuente 5v 1a para Arduino

Cable Dupont Macho – Macho 30 CM (40 und)
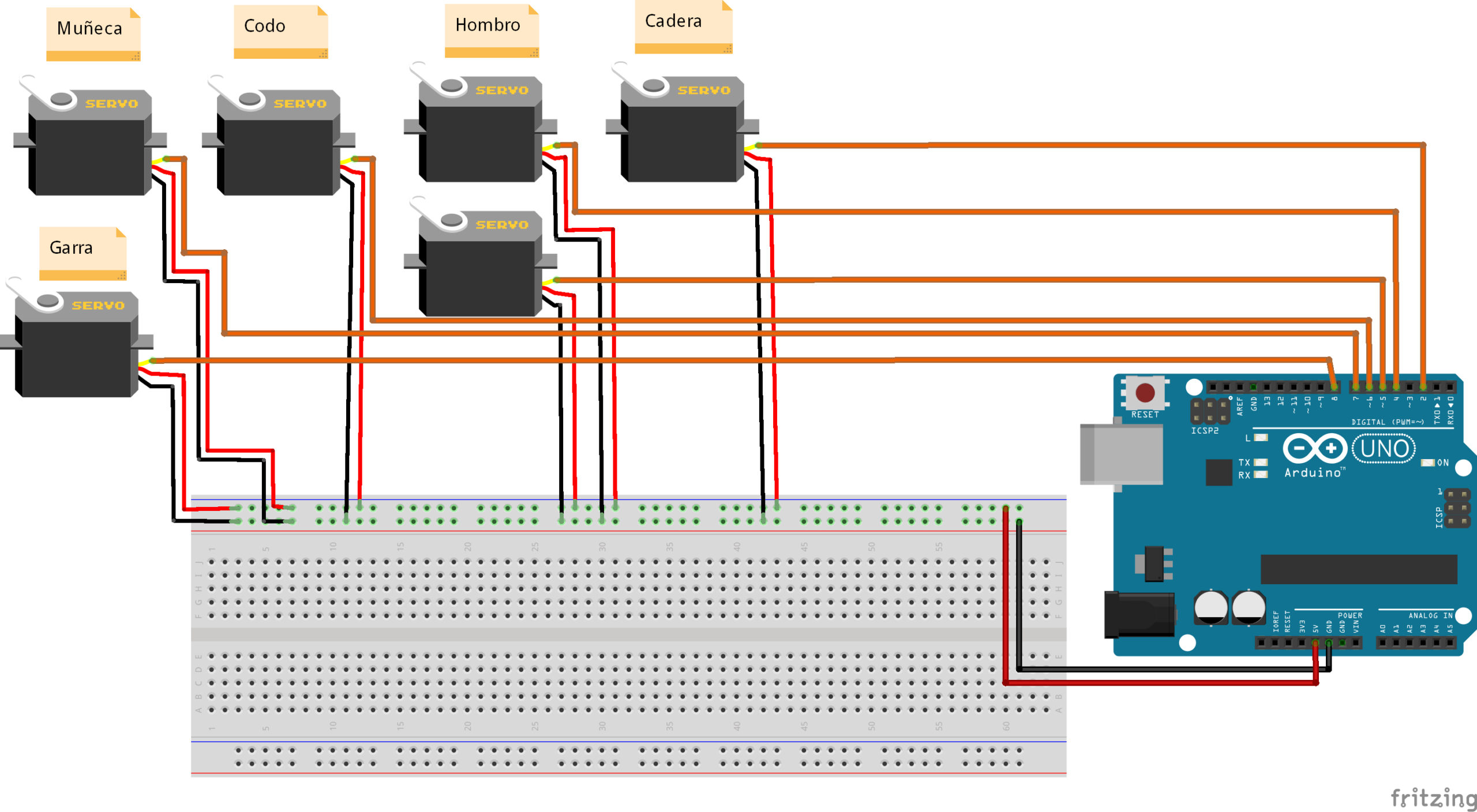
Conexión Electrónica
Procederemos a realizar la siguiente conexión electrónica en nuestro brazo robótico. Esta configuración es la base para que Matlab pueda comunicarse correctamente con cada articulación.
Esquema de Servomotores a Arduino Uno
Utiliza el siguiente diagrama para conectar los 6 servomotores. Asegúrate de compartir la tierra (GND) entre la fuente externa y el Arduino: