



Control Brazo Robótico Kimo 6s
desde Python
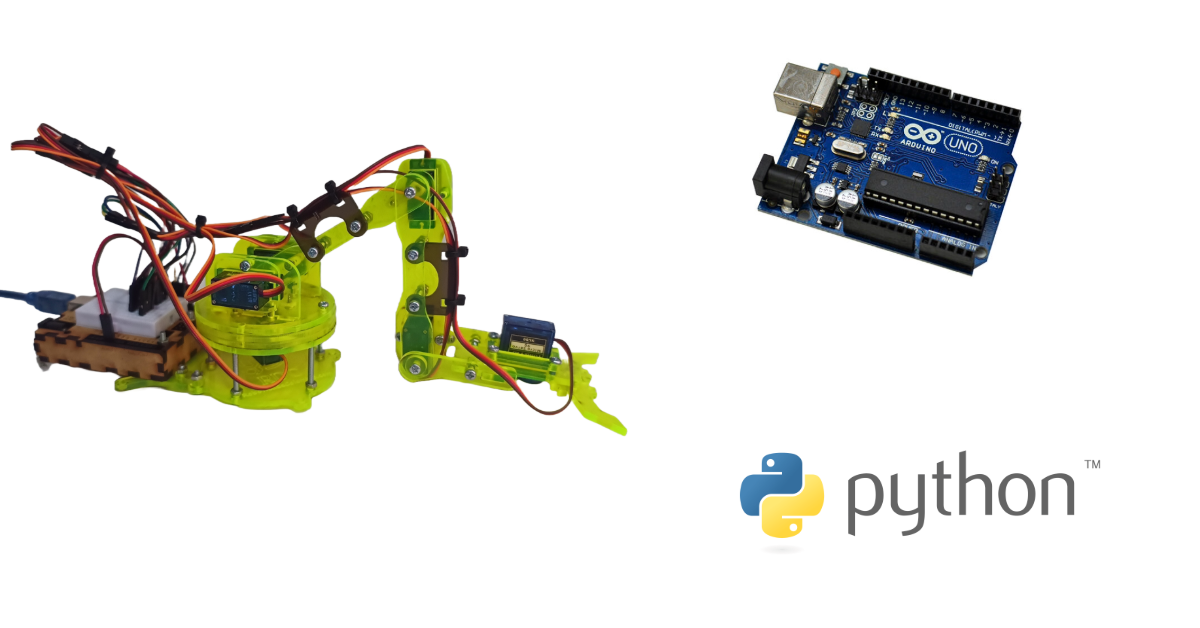
¡Bienvenidos al curso sobre el control de un brazo robótico con Arduino y Python! Aprenderás a conectar y controlar un brazo de 6 servomotores SG90 usando un Arduino Uno y scripts de Python para enviar comandos motor por motor.
Este proyecto práctico te permitirá comprender cómo interactúan el hardware y el software para controlar un dispositivo físico, adquiriendo habilidades valiosas en electrónica y programación paso a paso.
Materiales Necesarios:
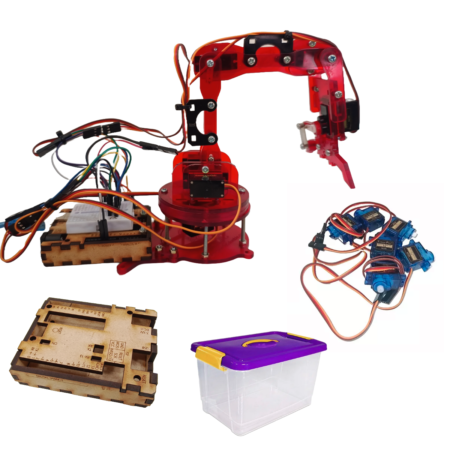
Brazo Robótico Kimo con Servomotores – Rojo
ARDUINO UNO R3 ATMEGA328P + CABLE DE DATOS

Protoboard Mini 170 Puntos

Adaptador Fuente 5v 1a para Arduino

Cable Dupont Macho – Macho 30 CM (40 und)
Conexión Electrónica
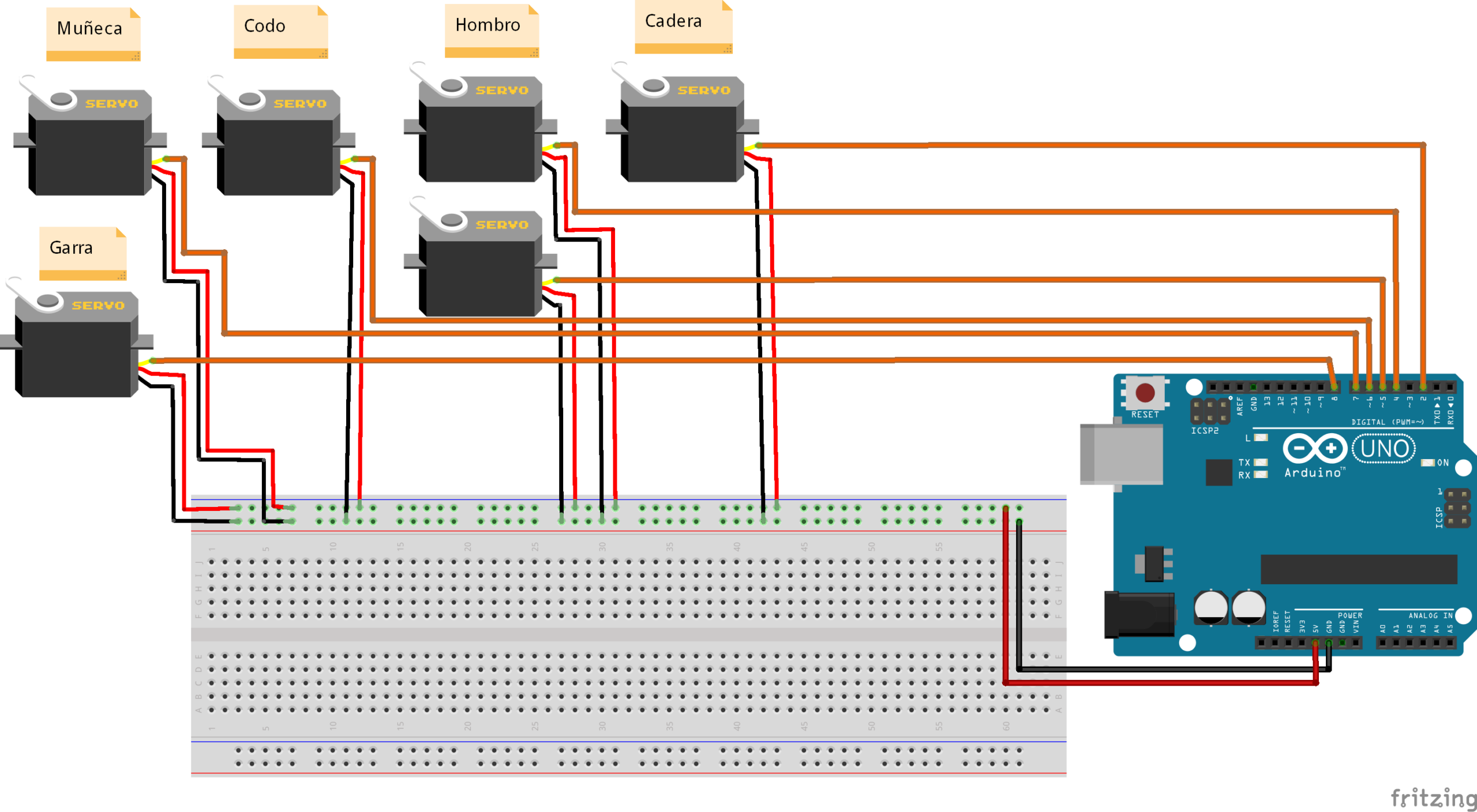
Debes realizar la siguiente conexión electrónica. Se mostrará el esquema en Arduino UNO, pero ten en cuenta que la conexión en la shield de expansión para Arduino Nano es la misma. Esta configuración permitirá que los scripts de Python controlen cada movimiento del brazo.
Pasos a Seguir:
Utiliza el siguiente diagrama para conectar los 6 servomotores. Si deseas descargar el esquema en alta resolución, solo debes dar clic en la imagen:
Ahora debes cargar los códigos a tu Arduino. Si no sabes cómo realizar este proceso, a continuación puedes acceder a nuestra guía paso a paso para aprender a hacerlo correctamente.
APRENDERExplicación Código:
Primero exploraremos detalladamente el código de Python utilizado para controlar el brazo robótico. Aprenderemos cómo enviar comandos desde Python al Arduino para mover cada servomotor del brazo de manera precisa. Luego, nos sumergiremos en el código de Arduino, comprendiendo cómo recibir y ejecutar estos comandos. Finalmente, pondremos en práctica nuestro conocimiento, realizando movimientos manuales del brazo robótico para experimentar directamente con su funcionamiento y potencial.
Código Completo Python:
Primero te mostraremos el código completo y luego procederemos a explicar paso a paso.
import serial import time # Configuración del puerto serial puerto_serial = 'COM15' # Puerto serial al que está conectado el Arduino baudios = 115200 try: # Intentar inicializar la comunicación serial arduino = serial.Serial(puerto_serial, baudios, timeout=1) print("Puerto serial conectado correctamente.") except serial.SerialException: # Si hay un error al abrir el puerto serial, imprimir un mensaje de error y salir del programa print("Error al abrir el puerto serial. Asegúrate de que el Arduino esté conectado correctamente.") exit() # Función para enviar cinco valores al Arduino y esperar la confirmación def enviar_valores_confirmacion(valores): while True: valores_validos = [max(0, min(val, 180)) for val in valores] # Asegura que los valores estén en el rango [0, 180] mensaje = ' '.join(map(str, valores_validos)) # Convertir la lista de valores a una cadena separada por espacios arduino.write(mensaje.encode()) # Envía la cadena al Arduino print("Enviados valores:", mensaje) # Esperar a recibir el mensaje de vuelta de Arduino mensaje_recibido = arduino.readline().decode().strip() print("Mensaje de Arduino:", mensaje_recibido) if mensaje_recibido == "Mensaje recibido correctamente por Arduino.": break # Bucle infinito while True: try: # Solicitar al usuario que ingrese los valores para los servomotores valores_servomotores = [] for i in range(5): valor = int(input(f"Ingrese el valor para el servomotor {i+1}: ")) valores_servomotores.append(valor) # Envía los valores ingresados al Arduino enviar_valores_confirmacion(valores_servomotores) # Espera 4 segundos
Práctica Final:
Moviendo el Brazo Robótico
Para finalizar vamos a ejecutar nuestro programa en Python e ingresaremos los valores de cada servomotor manualmente, como se observa en la siguiente imagen:
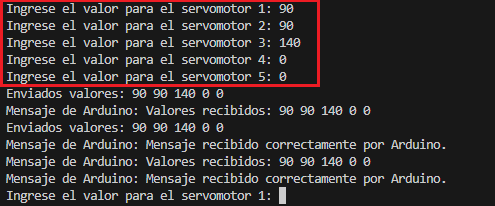
En el cuadro rojo podemos observar cómo se introdujeron los valores por cada motor y nuestro Arduino ha devuelto la confirmación de movimiento de todas las articulaciones.
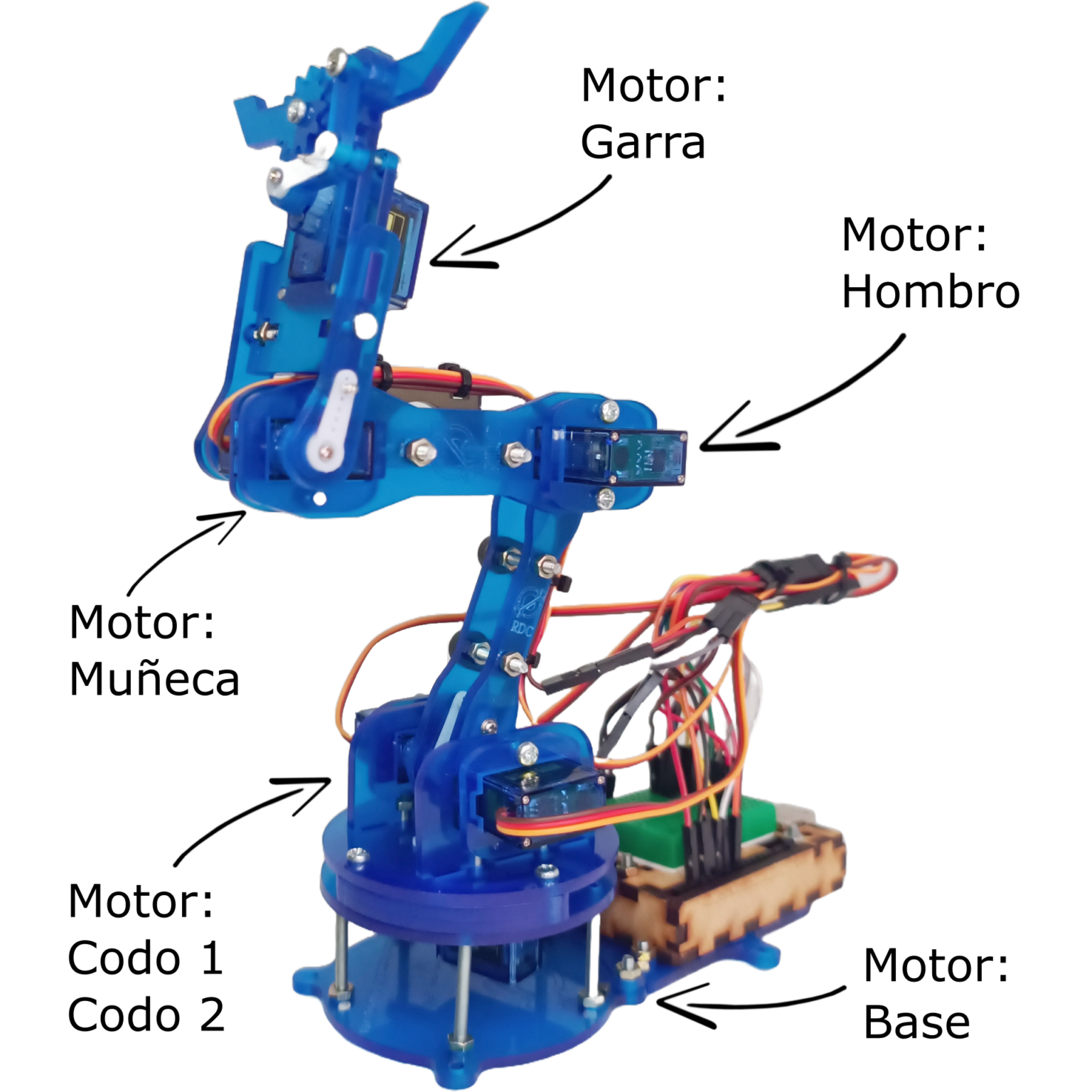
Nombre Articulaciones
A continuación, se presenta la referencia visual para identificar cada uno de los motores y sus respectivas posiciones en la estructura del brazo: