



¿Cómo Mover tu Brazo Robótico
de 6 Servos con Computadora?
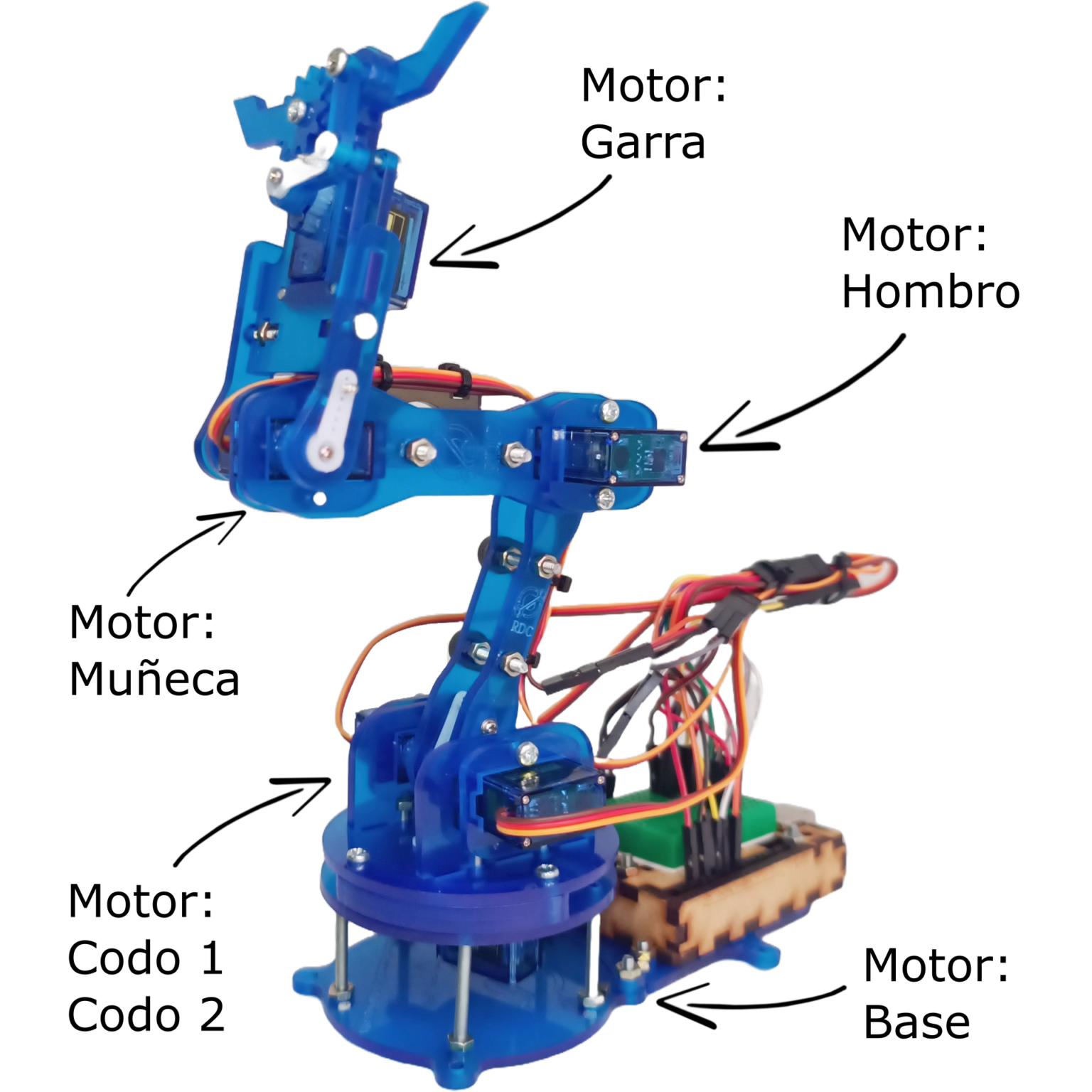
El Brazo Robótico Kimo es un manipulador que contiene 6 servomotores SG90 o MG90S. Es un sistema de Código Abierto diseñado para fines educativos, totalmente manipulable con placas de desarrollo estándar.
En la siguiente guía encontrarás los pasos para controlar tu Brazo Kimo mediante un mando a distancia infrarrojo (IR Remote) y su sensor receptor.
Materiales Necesarios:
Brazo Robótico Kimo con Servomotores Negros
Arduino Uno R3 ATmega328P + Cable de Datos

Control Remoto Infrarrojo HX1838 + Receptor

Protoboard Mini 170 Puntos

Adaptador Fuente 5V 1A para Arduino

Cable Dupont Macho - Macho 30 cm (40 und)
Control Manual
Iniciaremos por el control primario, esta parte es 100% necesaria para un correcto funcionamiento de tu proyecto. Si te saltas directamente al control por bluetooth, posiblemente no te funcione y tu manipulador robótico no presente movimiento.
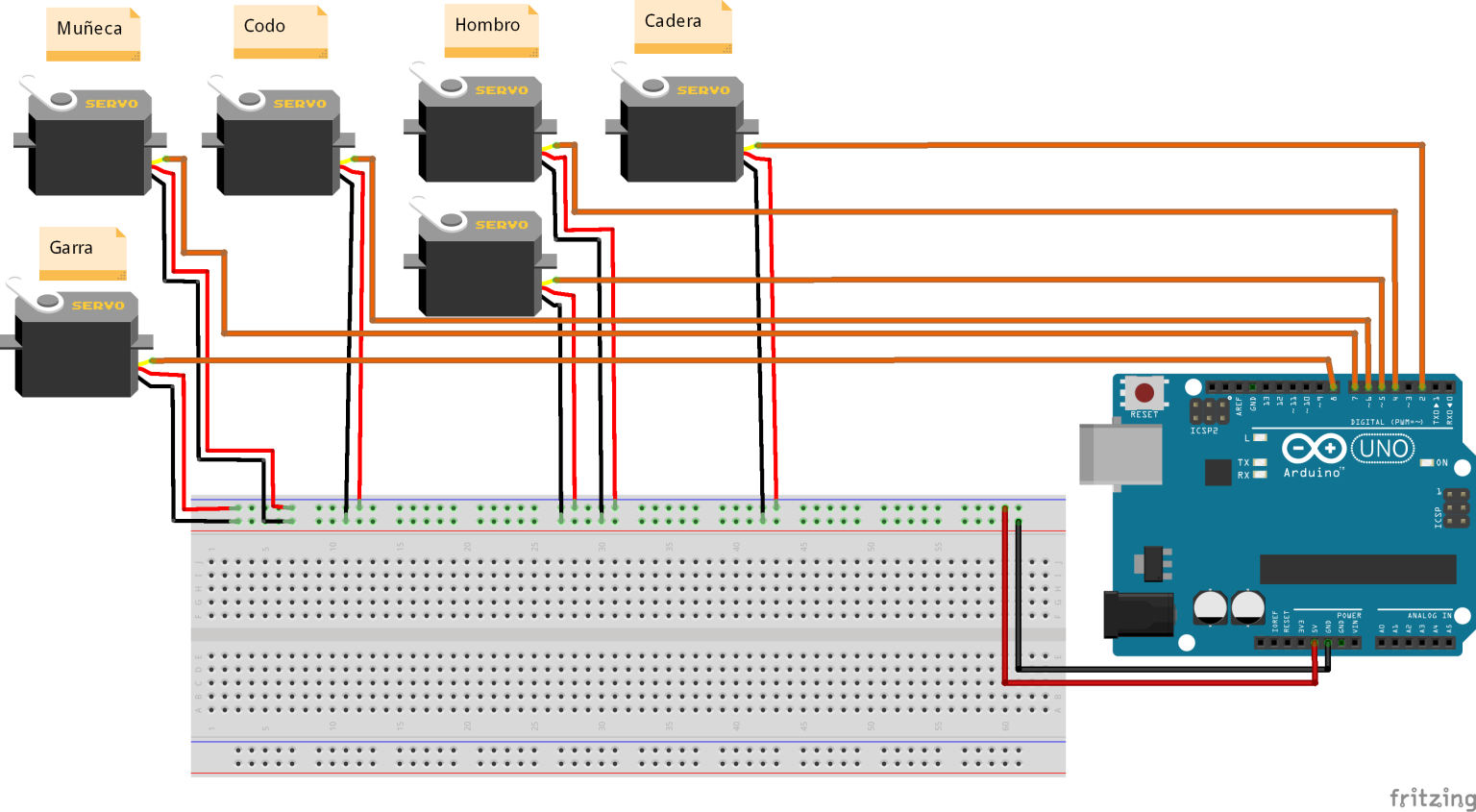
Esquema Electrónico
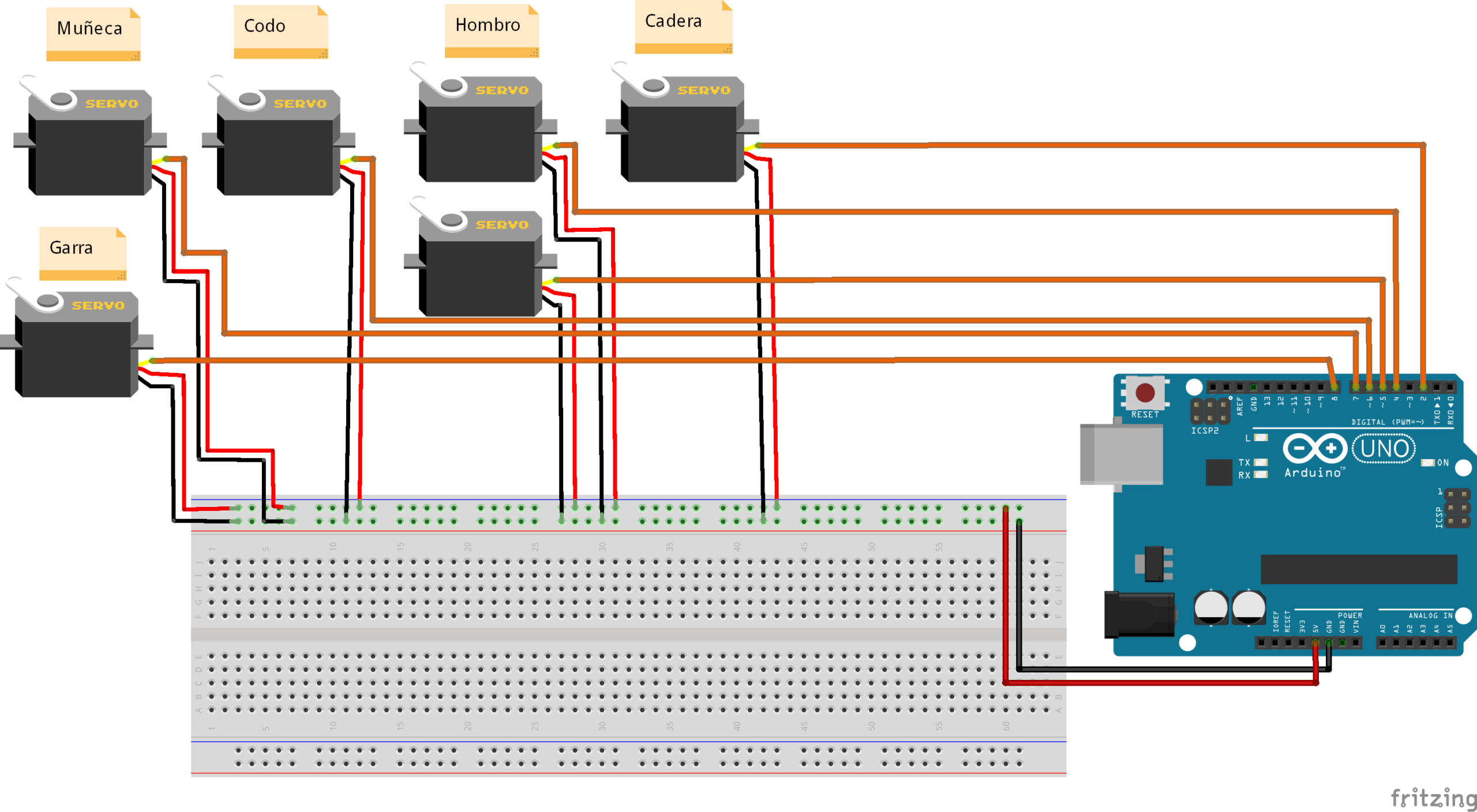
Deberás seguir el siguiente esquema electrónico para tu manipulador robótico. Si compraste un kit completo, verifica que los pines de conexión del Arduino a tus servomotores estén correctos:
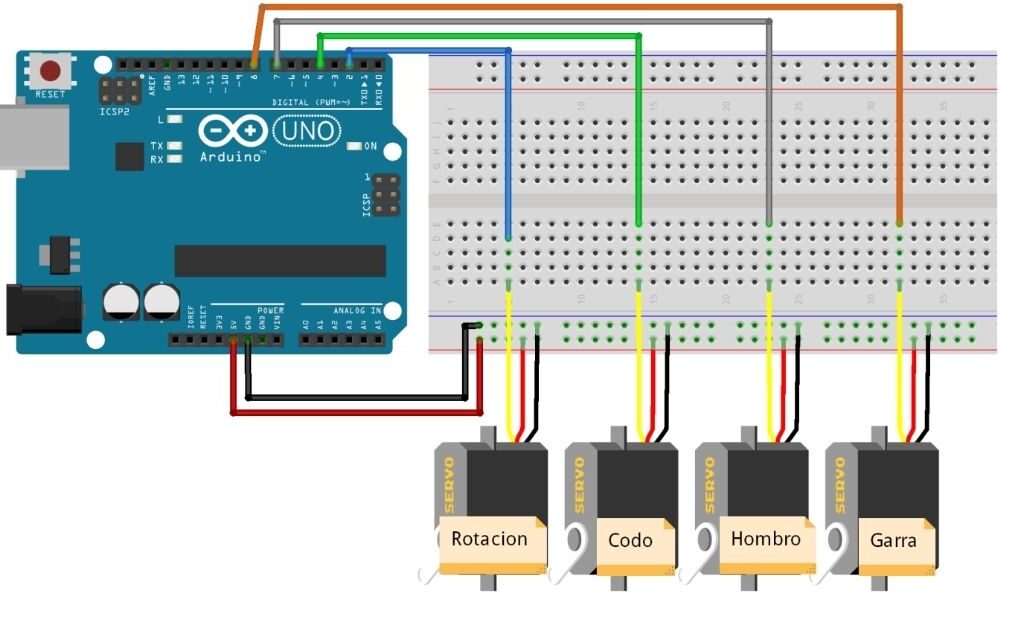
(Recuerda dar click sobre la imagen para descargar el esquema de conexión en Fritzing)
CONEXIÓN EN ARDUINO UNO
Esquema de Conexión

Si no tienes el programa Fritzing, puedes descargarlo en el siguiente link:
Descargar Fritzing aquí
Uso del Monitor Serial
Con el Código cargado correctamente procederemos a abrir el monitor serial como se indica en la siguiente imagen.(Recuerda tener tu tarjeta conectada a tu Arduino correctamente con el puerto COM indicado ya seleccionado en la pestaña herramientas).
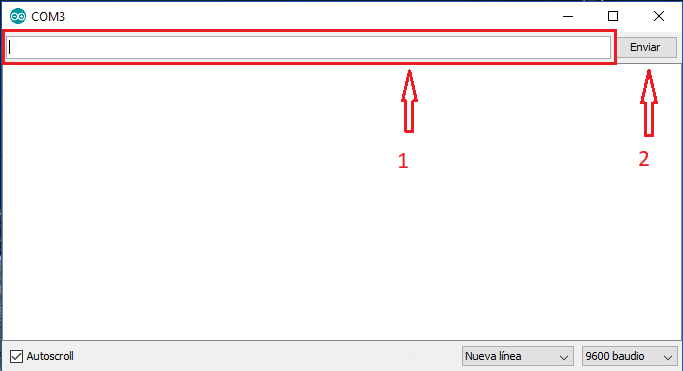
En el monitor serial en la opción 1 escribimos el comando y en la opción 2 enviamos el comando.
Enviaremos a través del monitor serial letras, que serán interpretadas por el código como como comandos de movimiento del servomotor, según los condicionales que están creados.
Ejemplo de Condicionales Creados
Veremos un ejemplo del condicional creado:
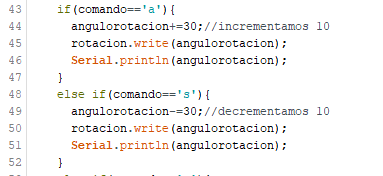
Donde:
- En la fila 43 indicamos que si el puerto serial recibe el comando (letra) “a” realizara la acción contemplada en las filas 44 a la 46
- En la fila 44 indicamos al servomotor que aumente su posición actual 30 grados en sentido positivo.
- En la fila 45 le ordenamos al servomotor escribir en el pin digital 2 el Angulo actual de rotación.
- En la fila 46 escribimos el Angulo de rotación en el puerto serial.
- En la fila 48 inicia el segundo condicional para el mismo servomotor pero esta vez se activa cuando recibe el comando (letra) “s“
- En la fila 49 indicamos que gire el servomotor 30 grados pero esta vez en sentido negativo.
- En la fila 50 escribimos el nuevo Angulo en el pin digital 2.
- En la fila 51 escribimos el Angulo de rotación en el puerto serial para que puedas visualizarlo cuando controles el brazo robótico de forma manual.
Comandos de control de tu Brazo Robótico
Comandos a escribir en el puerto serial para el movimiento de las articulaciones:
| Articulación | Acción / Comando |
|---|---|
| Cadera | Derecha = a | Izquierda = s |
| Hombro | Arriba = e | Abajo = d |
| Codo | Arriba = r | Abajo = f |
| Muñeca | Arriba = t | Abajo = g |
| Garra | Abrir = z | Cerrar = x |
Nombre Articulaciones