



📅 28 de julio de 2025
Guía de Conexión Electrónica TurboBot
Diagramas de potencia y motores paso a paso.
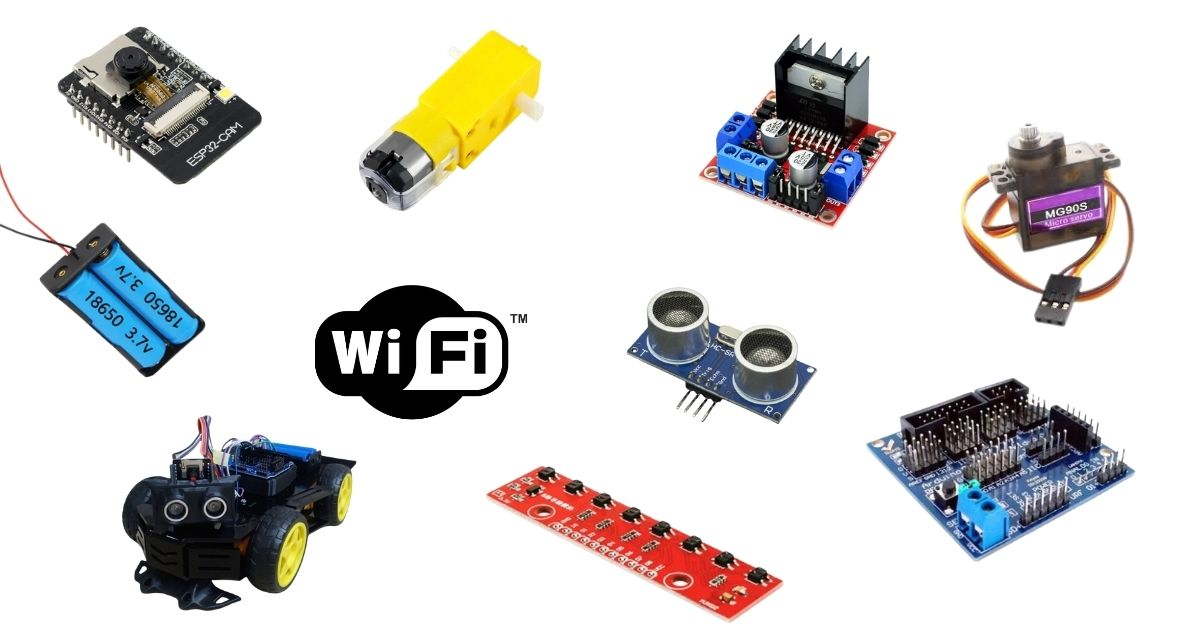
Componentes del TurboBot
Módulos de Conexión del TurboBot
En esta sección descubrirás cómo se organiza la electrónica del TurboBot por módulos independientes. Entiende la alimentación, los sensores y la integración con el cerebro del robot de forma estructurada.
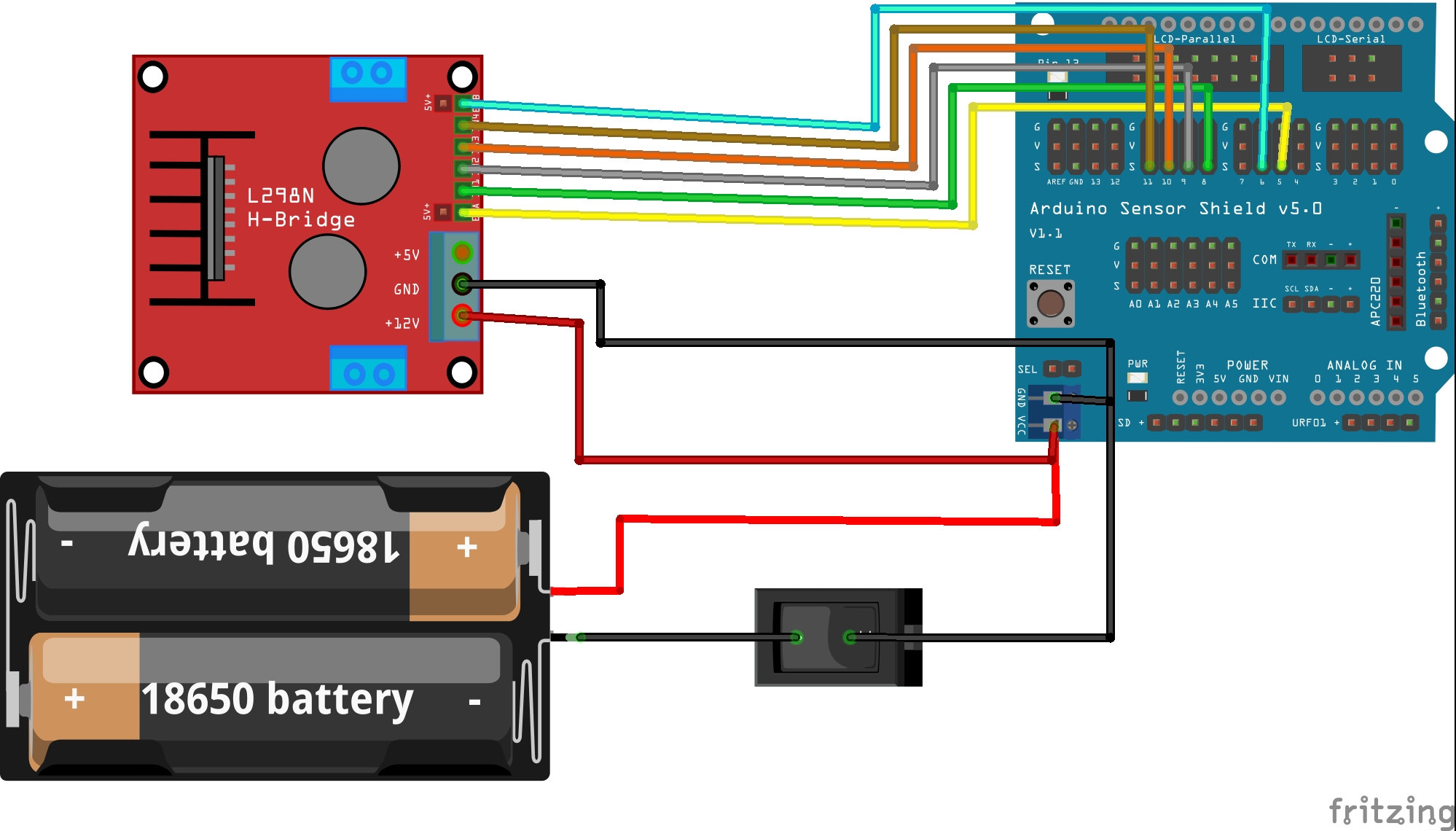
Módulo de Poder
Componentes: Baterías 18650, Sensor Shield V5.0 y Puente H L298N.
Este módulo es el corazón energético del TurboBot. Se encarga de distribuir la energía necesaria: las baterías alimentan al Puente H, este a los motores, y mediante una regulación se entrega energía al Arduino para su funcionamiento lógico.
Módulo de Cámara y Radar
Componentes: ESP32-CAM, HC-SR04 y Servo MG90S.
Este módulo combina visión y detección de obstáculos. Mientras la ESP32-CAM transmite video en tiempo real vía Wi-Fi, el sensor ultrasónico escanea el entorno de 0° a 180° gracias al movimiento del servo, evitando colisiones.
Módulo Seguidor de Línea
Componentes: Sensor QTR-8A y Sensor Shield.
Especializado en la lectura de superficies. Gracias al QTR-8A, el TurboBot detecta el contraste entre el suelo y la línea, permitiendo una navegación autónoma precisa y veloz en pistas de competencia.
