Ensamble Brazo Robotico Kimo 6 Servos
A continuación te vamos a enseñar como ensamblar el brazo robótico Kimo, necesitas varios materiales, los cuales te vamos a mostrar, la utilización del programa semi-industrial es totalmente necesario, necesitamos llevar el brazo robótico a cierto Angulo exacto y solo lo lograremos con el programa.
Materiales Necesarios
- Brazo Robótico Kimo.

- Servomotores sg90. (puedes utilizar mg90)

- Destornillador de estrella

- Programa Semi-Industrial 4s.

- Arduino UNO o Nano con su respecta expansión de Arduino Nano.

- 3 Jumpers M-H

jumpers m-h2
Pasos a Seguir
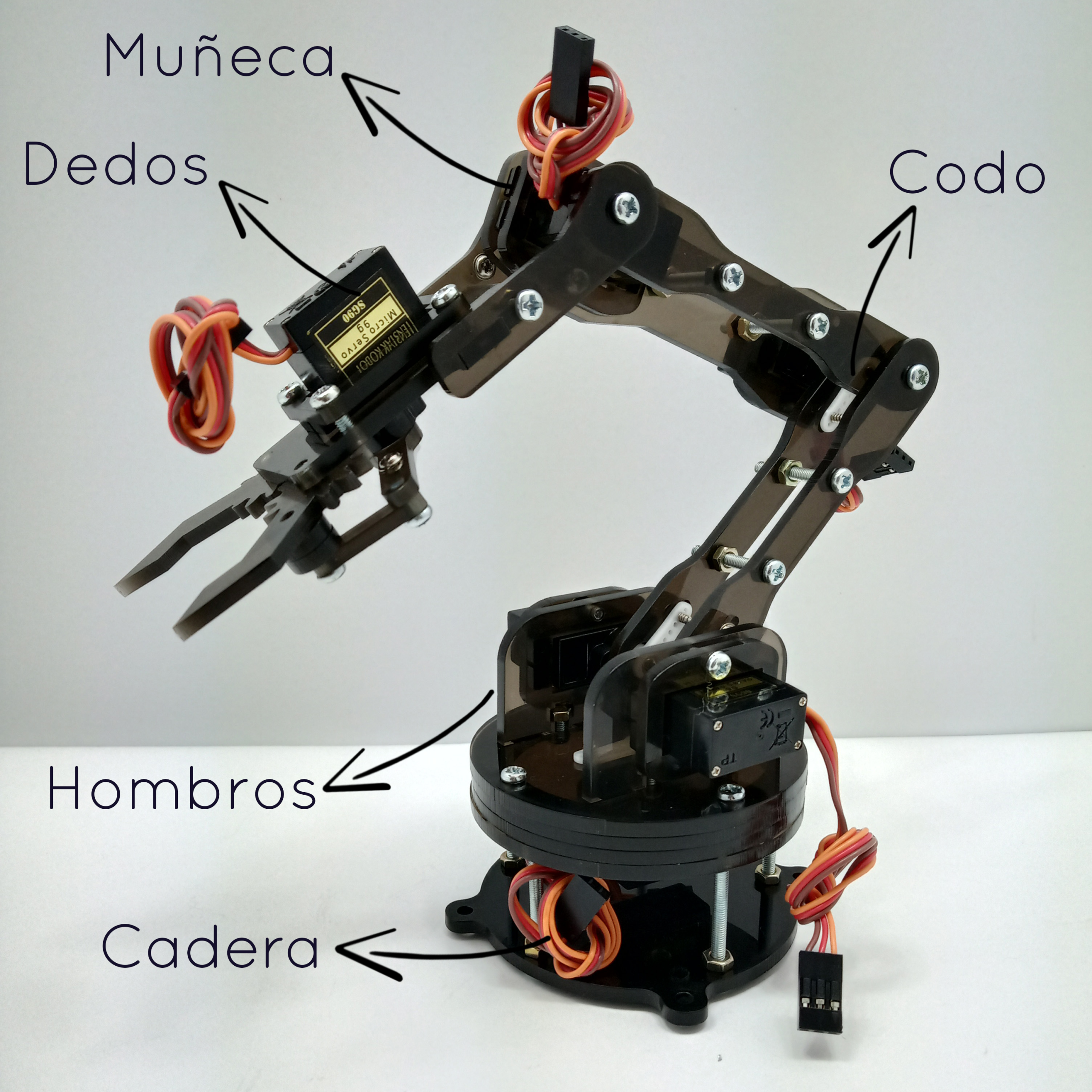
- Debes saber que nombre tiene cada Articulación, en la siguiente imagen te informamos.

- Montar el servomotor base en su posición, debes utilizar los tornillos de 8cm que están ya montados en su posición:



- Montas toda la base y aprietas como aparece en la imagen:

- Atornillamos el acople largo de servomotor como se observa en la siguiente imagen.

- instalaremos la articulación Hombro.

- Soltamos los dos acoples laterales del hombro y acoplamos los servomotores de la siguiente forma.

- ahora los dos servomotores los llevamos a 90 grados con el programa semi industrial y acoplamos los soportes laterales de la siguiente forma, recuerda llevar los servomotores a 90 grados. (aprieta los soportes plásticos con su mini tornillo).

- Instala los dos soportes a su base, recuerda dejar los dos servomotores encontrados en la misma dirección.

- Instalar el hombro a la cadera, el Angulo de acople en este caso es despreciable.

- instalas los dos servomotores de codo y muñeca.

- Ahora lleva el motor de codo a 90 grados y lo instalas de forma vertical.

- Lo llevamos el motor a 0 grados y quedo de la siguiente posición, recuerda apretar con el tornillo el acople plástico del motor.

- Instalamos el servomotor de garra.

- Ahora dejamos el servomotor de garra a 90 grados y lo acoplamos, recuerda tener la garra cerrada al momento de acoplar.


- El servomotor de muñeca lo dejamos en 90 grados y acoplamos su pin de forma vertical.

- Ya tienes tu brazo robótico funcionando, éxitos en tu proyecto.
Contáctanos
Carrera 81C Sur #55-39
Bogotá D.C. – Colombia

Copyright 2025 © Robotica de Colombia

Descarga App Control Blueetooth Recomendada


- Image
- SKU
- Rating
- Price
- Stock
- Availability
- Add to cart
- Description
- Content
- Weight
- Dimensions
- Additional information