Como Ensamblar Carro Robótico MultiCarBot
En esta primera guía aprenderás a ensamblar paso a paso el MultiCarBot, un robot multifuncional diseñado para convertirse en tu laboratorio rodante. Una vez armado, este robot será capaz de seguir líneas, esquivar obstáculos y competir en batallas de sumo gracias a su versatilidad y estructura robusta. Este manual te enseñará a montar correctamente cada componente: desde los motores hasta el controlador electrónico, dejando listo tu MultiCarBot para programarlo y ponerlo a prueba en múltiples retos de robótica. ¡Construye, calibra y prepárate para dominar el terreno!
🧰 Materiales necesarios
Herramientas requeridas:
- Destornillador estrella (tipo cruz)
Componentes incluidos en el kit:
- Tornillería (tornillos, tuercas, separadores)
- Piezas del chasis en acrílico o plástico (base, soporte de motores, soporte superior)
- Cinta transparente pequeña.
🔧 Preparación de Motorreductores y Switch
Antes de continuar con el montaje, es importante preparar correctamente los motorreductores y el switch de encendido, ya que son esenciales para el funcionamiento eléctrico del MultiCarBot. En esta sección te mostramos cómo soldar y conectar los cables tipo jumper incluidos en el kit.
✅ ¿Qué debes tener listo?
- Cautín y estaño
- Jumpers largos incluidos en el kit (color rojo y negro preferiblemente)
- Motorreductores instalados
- Switch de encendido (interruptor de palanca o deslizable)
🧪 Consejos antes de soldar
- Realiza las conexiones en una superficie ventilada y estable.
- Asegúrate de que las puntas de los jumpers estén peladas 2-3 mm.
- Aplica una pequeña cantidad de estaño tanto al cable como al terminal antes de unirlos (preestañado).
- No apliques calor por más de 2 segundos para evitar dañar los pines del motor o el switch.
🔌 Conexiones esenciales
🔹 Motorreductores

- Soldadura de jumpers al motorreductor
- Suelda dos jumpers largos (uno rojo y uno negro) en los terminales del motorreductor.
- Asegura con un amarre o cinta termoencogible para evitar que se suelten.
- 🔺 Importante: deja el extremo libre con conector macho para conectar fácilmente al controlador más adelante.
- Verificación de polaridad
- No te preocupes si no conoces la polaridad aún, luego podrás invertir los conectores en caso de que giren al revés.
🔹 Switch de encendido
- Soldadura de jumpers al switch
- Suelda dos jumpers largos a los terminales del switch (usa colores diferentes si es posible).
- 🔺 Importante: deja el extremo libre con conector hembra, ya que se conectará a una salida macho de energía (como batería o portapilas).
- Verifica que el switch abra y cierre correctamente antes de continuar.
🧷 Conexión de Jumpers a Motores y Switch – Detalles Importantes
🔌 Motorreductores
- Usa jumpers largos del kit (rojo y negro).
- Suelda directo a los terminales del motor.
- Deja el extremo libre con conector macho.
- Asegura con cinta termoencogible o amarre plástico.
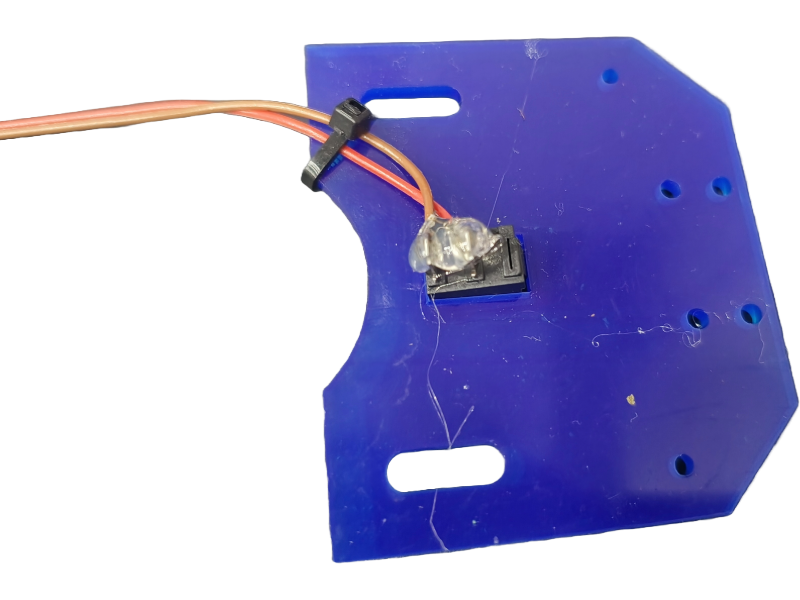
🔌 Switch
De ser posible, ajusta las conexiones aplicando una pequeña cantidad de silicona caliente sobre las uniones soldadas. Esto ayudará a fijar los cables, evitar falsos contactos y proteger contra vibraciones. No cubras completamente el área, deja visible la soldadura por si necesitas hacer mantenimiento o correcciones.
- Usa jumpers largos también.
- Suelda a los terminales del switch.
- Deja el extremo libre con conector hembra.
- Verifica su funcionamiento y evita cortos.
🛠️ Instrucciones de Ensamblaje
Antes de comenzar, es importante tener en cuenta que las piezas del chasis están diseñadas en materiales como acrílico o plástico rígido, por lo que se debe tener precaución al atornillar. No apliques demasiada fuerza, ya que podrías fisurar o romper una pieza.
Recomendamos usar una técnica de atornillado suave, en la cual gires primero en sentido contrario (como si desatornillaras) para remover rebabas o alinear la rosca, y luego procedas a atornillar suavemente. Siempre trabaja sobre una superficie firme y nivelada para mantener el control del ensamble.
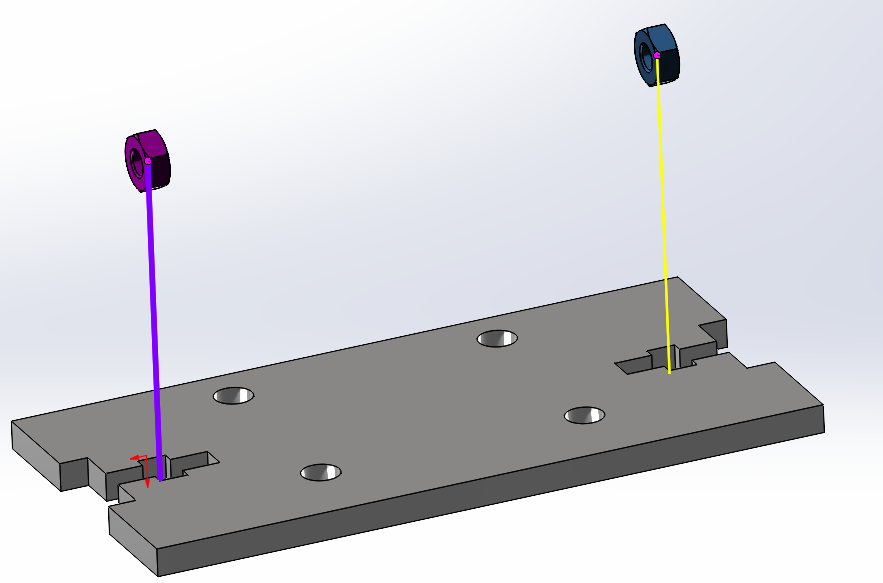
1. Preparación del chasis base
- Colocando la cinta transparente incluida en el kit en una esquina contigua de los huecos de la tornilleria, instalar dos tuercas M3 en la esquina lateral de la base principal
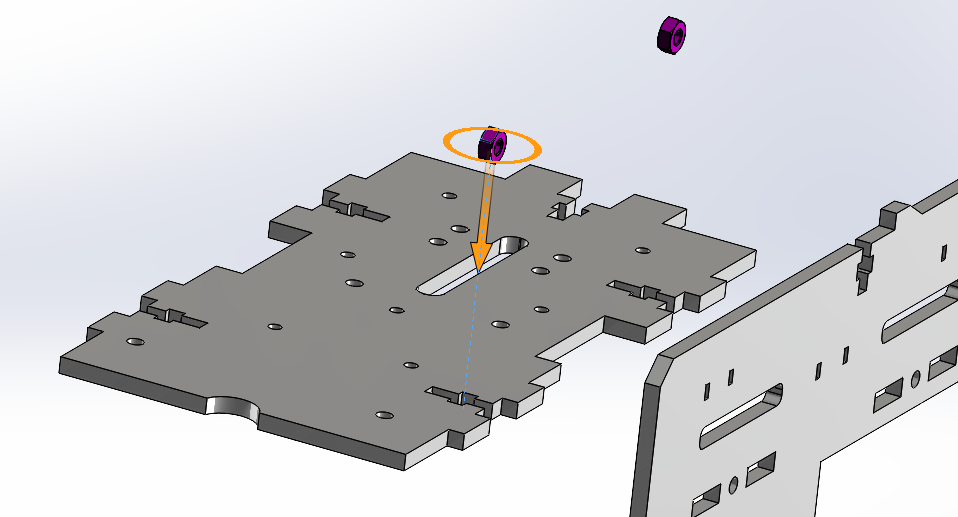
- Instalar el primer lateral como se observa en la imagen
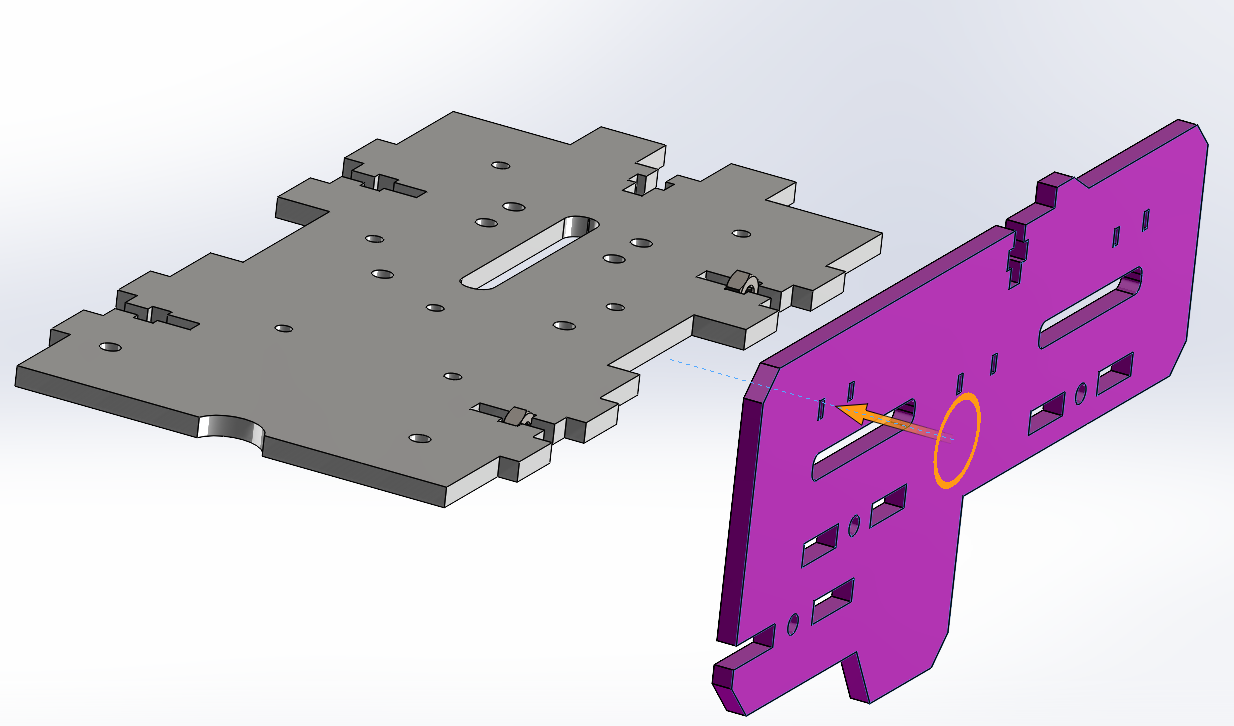
- insertar los dos tornillos M3x 16 y apretar levemente.
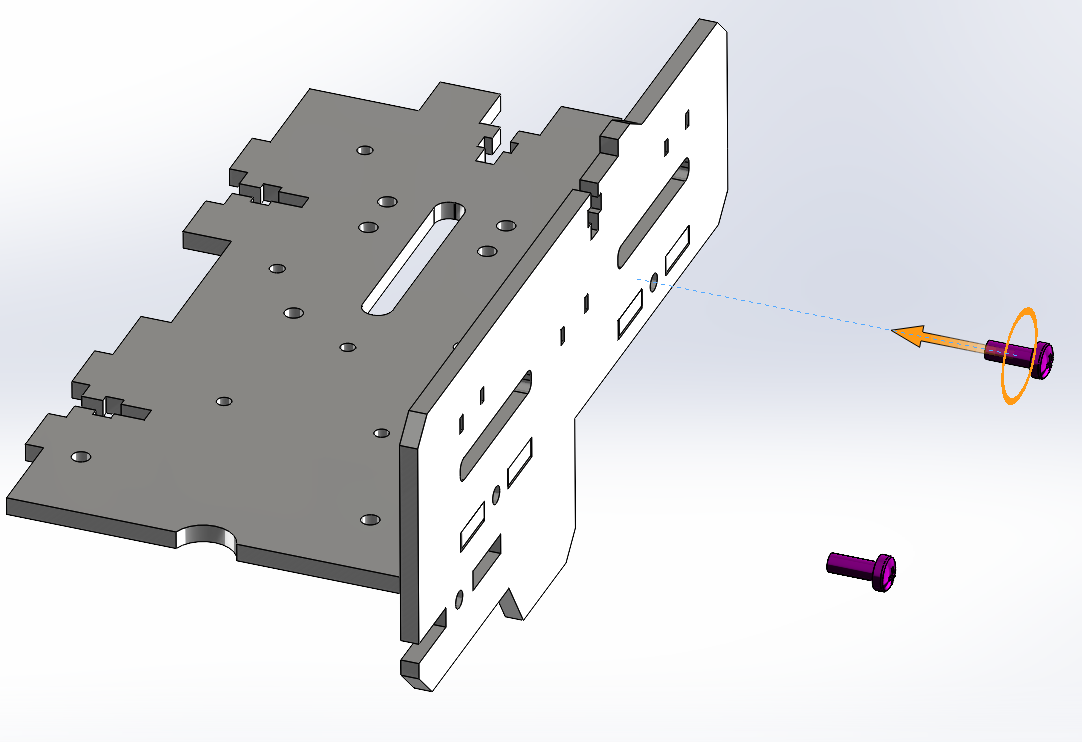
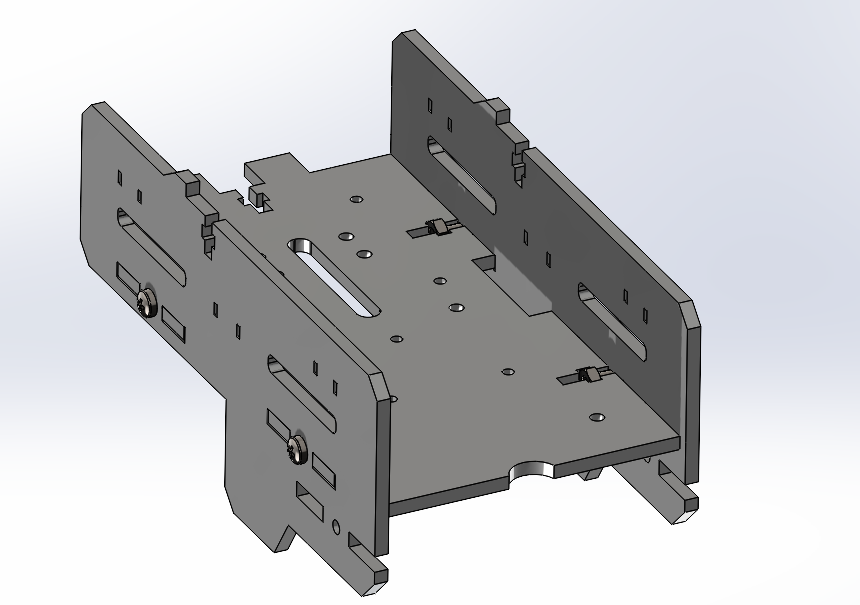
- Realizar la misma accion con el segundo lateral.
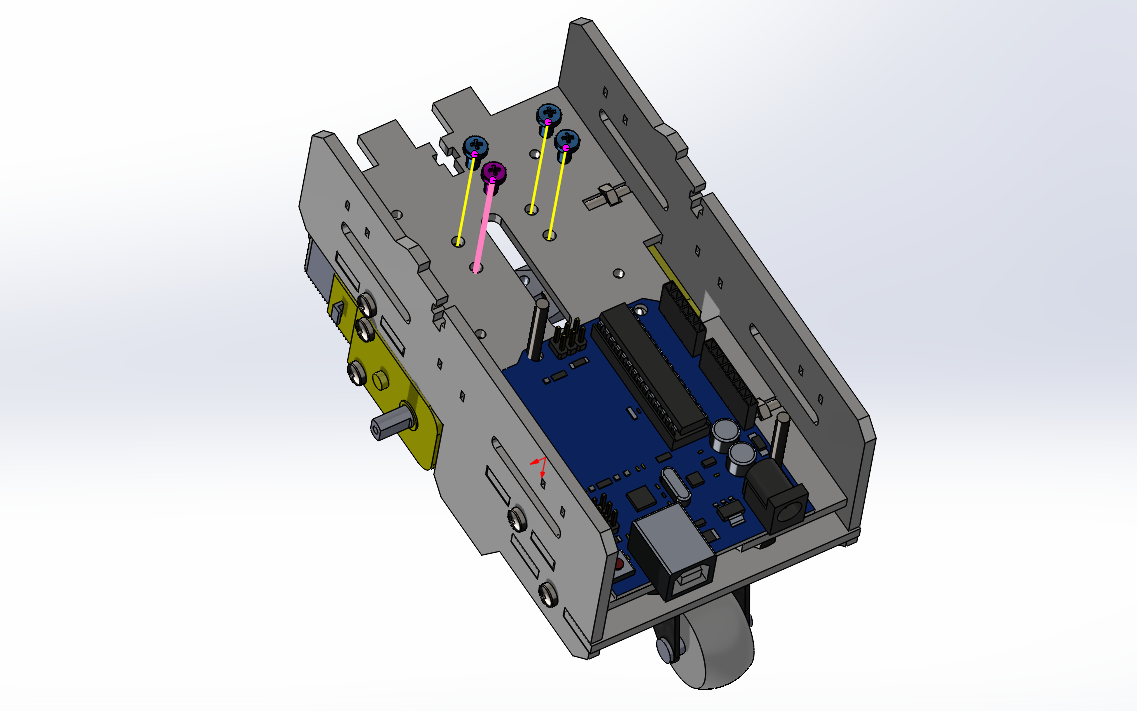
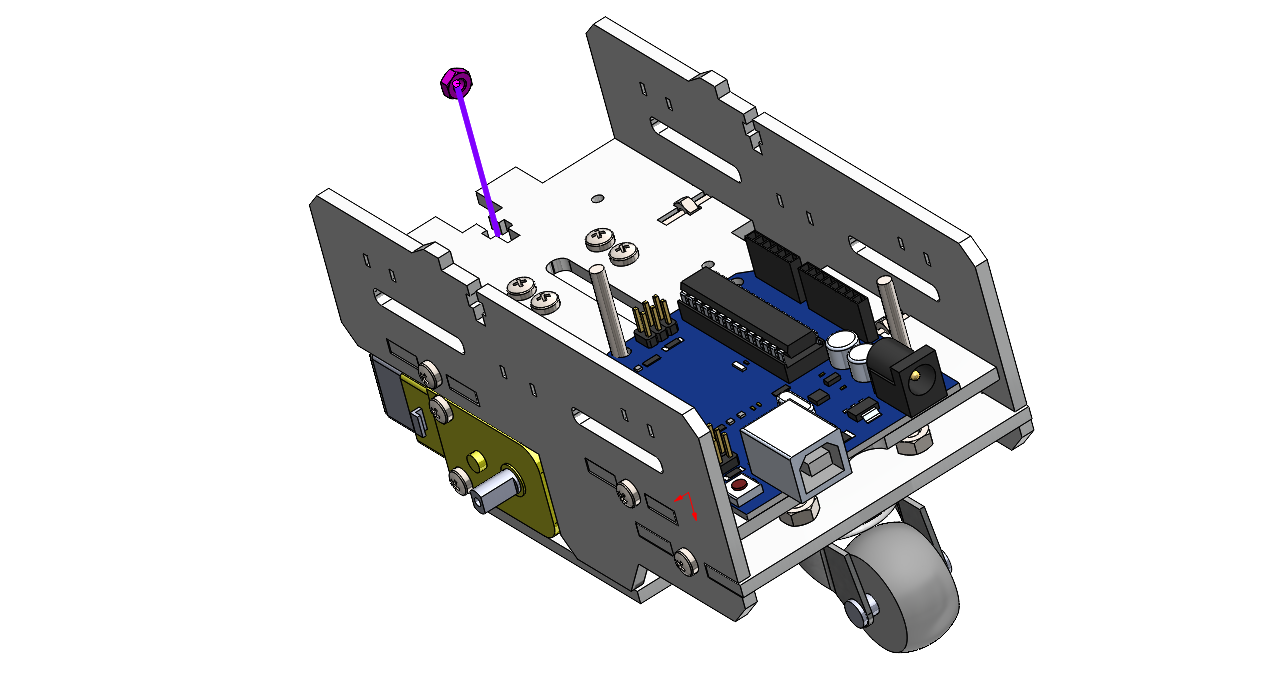
2. Instalacion tarjeta Arduino.
- Procede a instalar la tornilleria M3x25 o M3x30 dependa el caso segun la version de tu caja protectora de arduino.
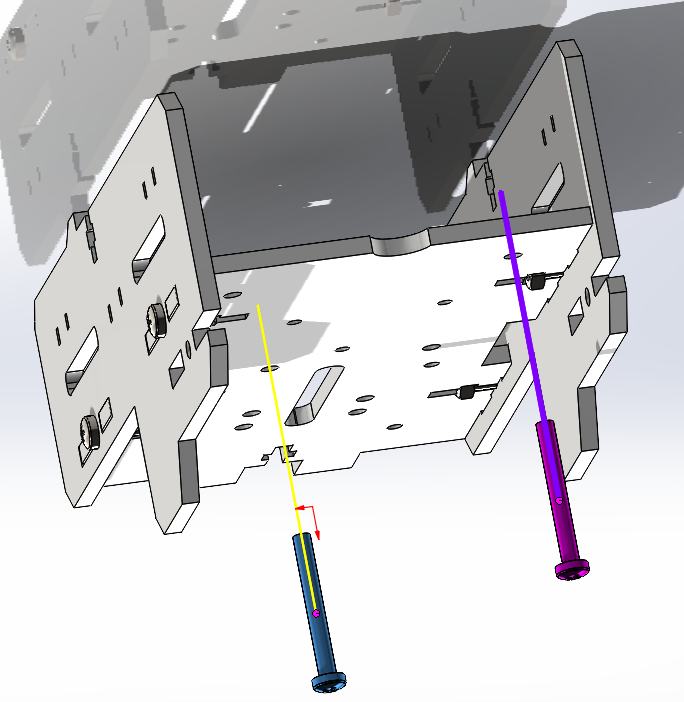
- Instala la placa Arduino en su parte superior.
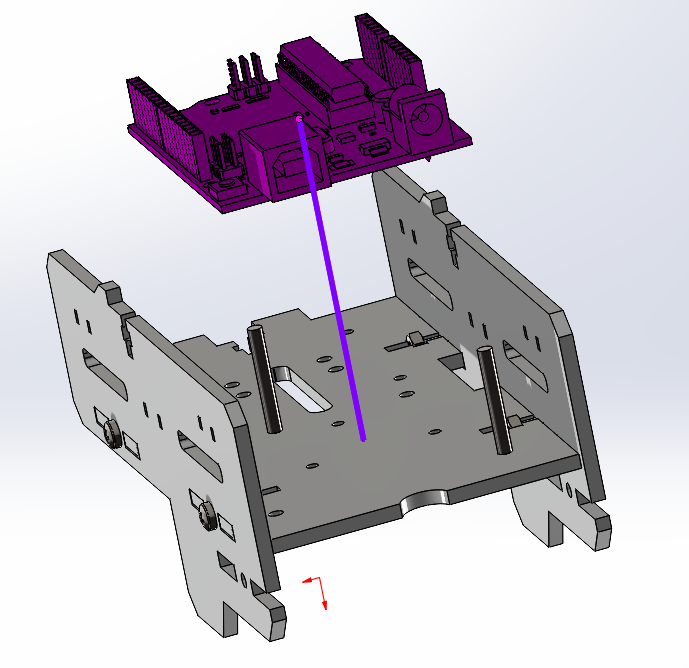
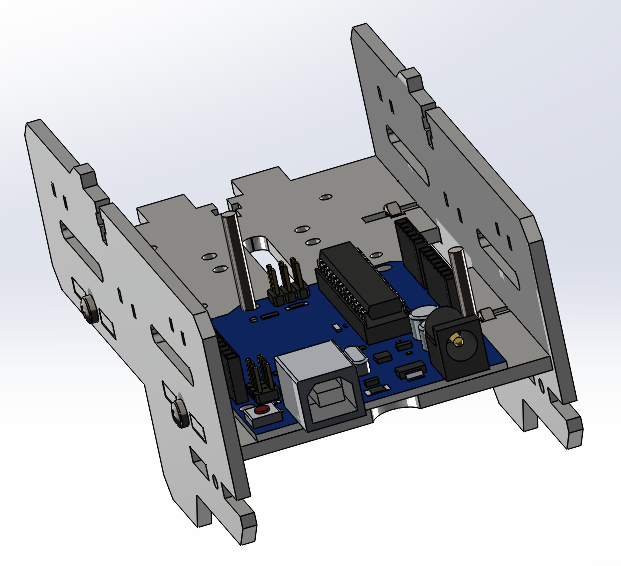
- Quedando de la siguiente forma:
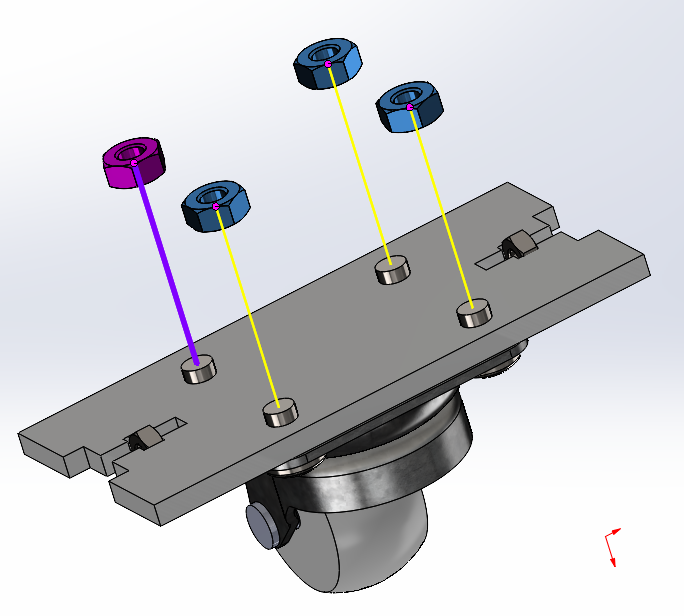
3. Instalacion Rueda Loca
- Con el mismo truco de la cinta sobre las aberturas de la tornilleria, instalar dos tuercas a cada extremo del soporte de la rueda loca.
- Haciendo uso de la tornilleria M4x6 o M4x8, instalar la rueda loca y los 4 tornillos.
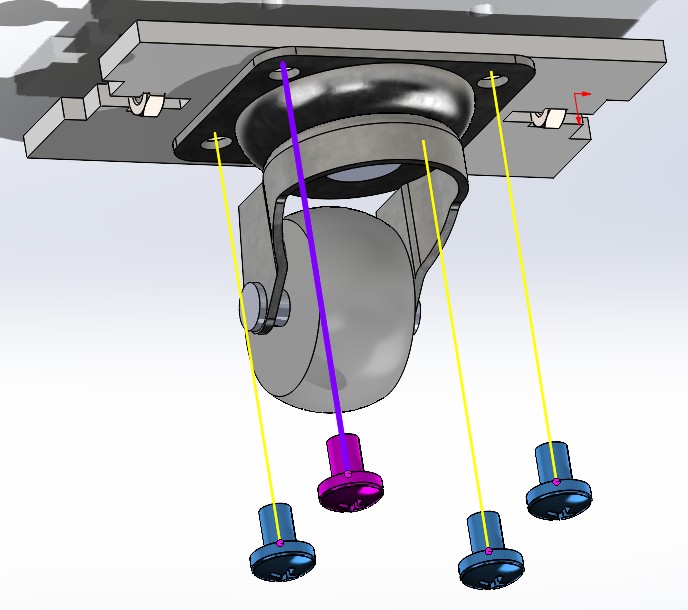
- Atornillar todo con tuercas M4.
- Soltando un poco uno de los laterales del chasis
- Procede a instalar y ajustar la lamina soporte de la rueda loca.
- Quedando completamente conectado la rueda loca.
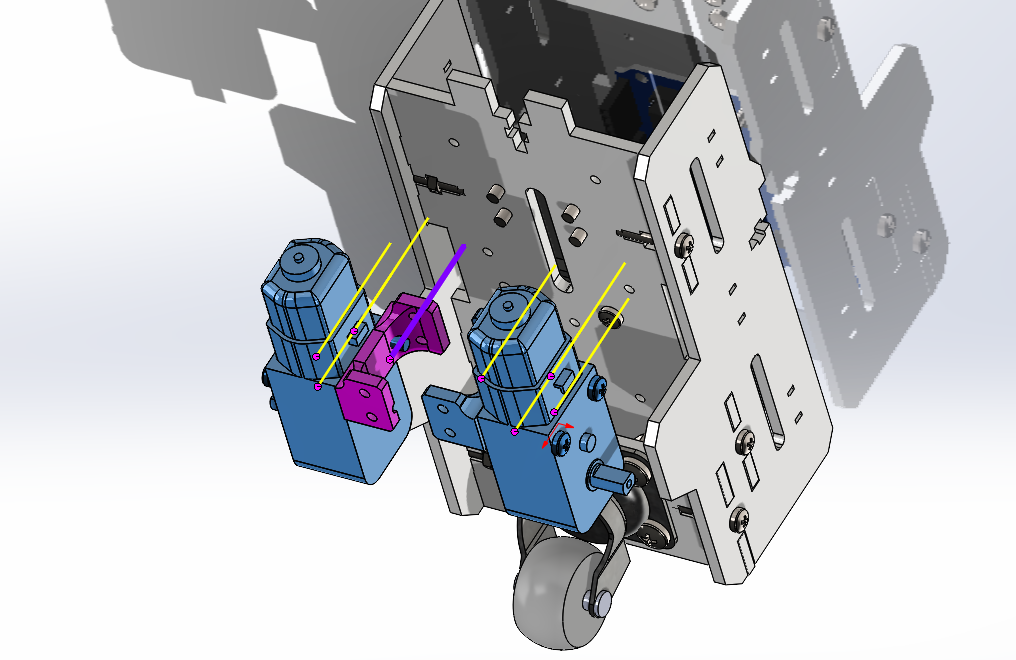
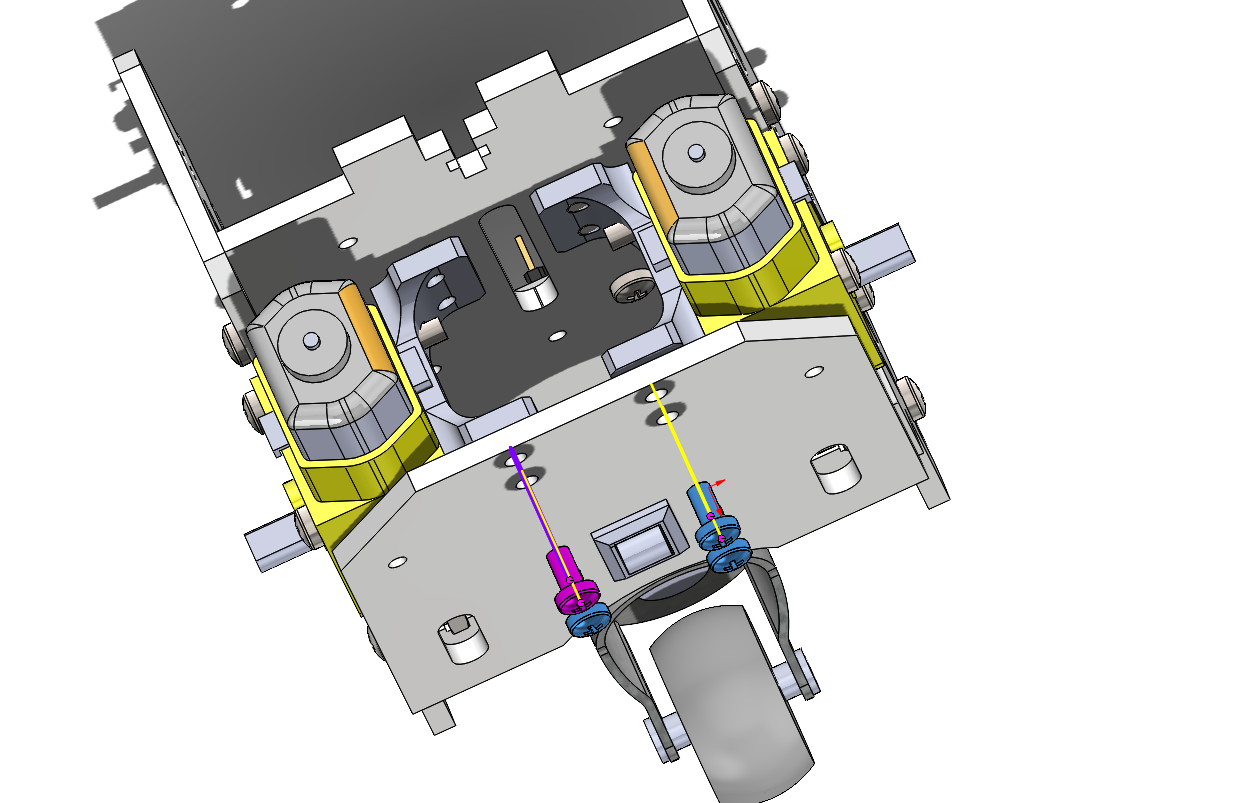
4. Instalacion Motorreductores.
Procederemos a instalar los motorreductores en sus soportes laterales plásticos. Para facilitar este paso y evitar dañar el material, utiliza la técnica de girar primero el tornillo en sentido contrario (como si fueras a desatornillar) para eliminar rebabas y alinear la rosca. Luego sí, atornilla suavemente hasta que quede firme, sin forzar el plástico.
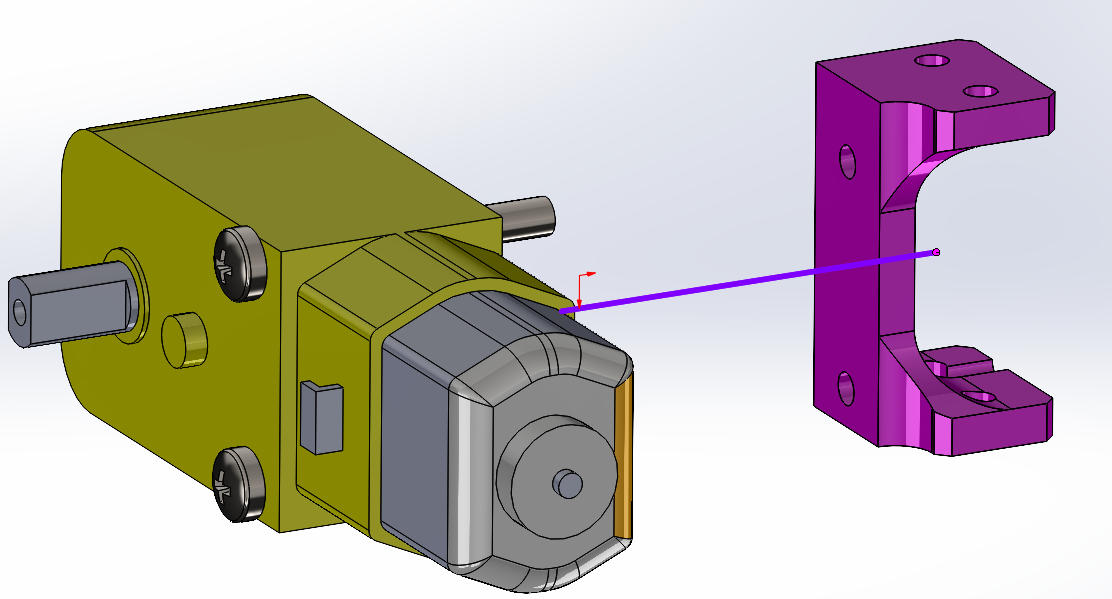
- Primero debemos instalar los motorreductores amarillo con el pin por fuera y la extremidad mas saliente hacia arriba del servomotor como se observa en al siguiente imagen.
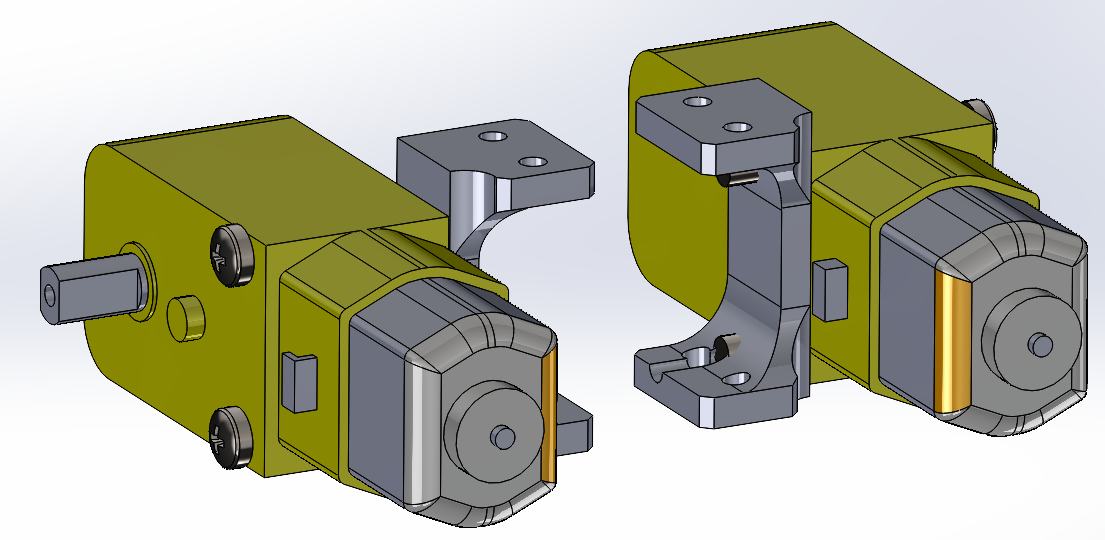
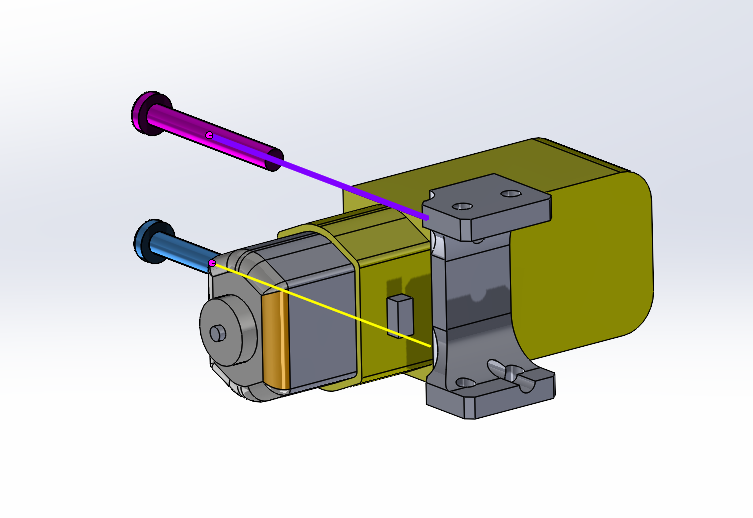
- Utilizando los tornillos M3 x 25, atornillamos el motorreductor al soporte, asegurándonos de que la parte más saliente del soporte quede orientada hacia arriba y la sección curvada apunte hacia la parte trasera del motorreductor, es decir, en dirección al cuerpo del motor. Esto garantizará una correcta alineación y firmeza en el montaje.
- Instalacion tornilleria M3 x 25
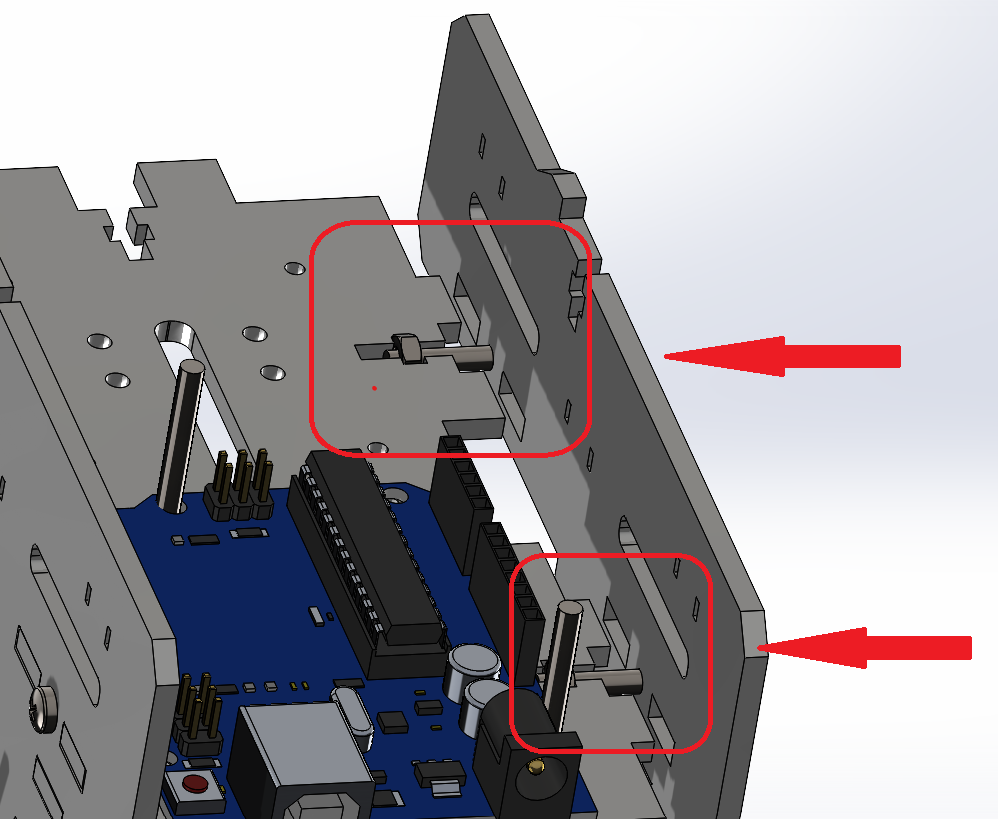
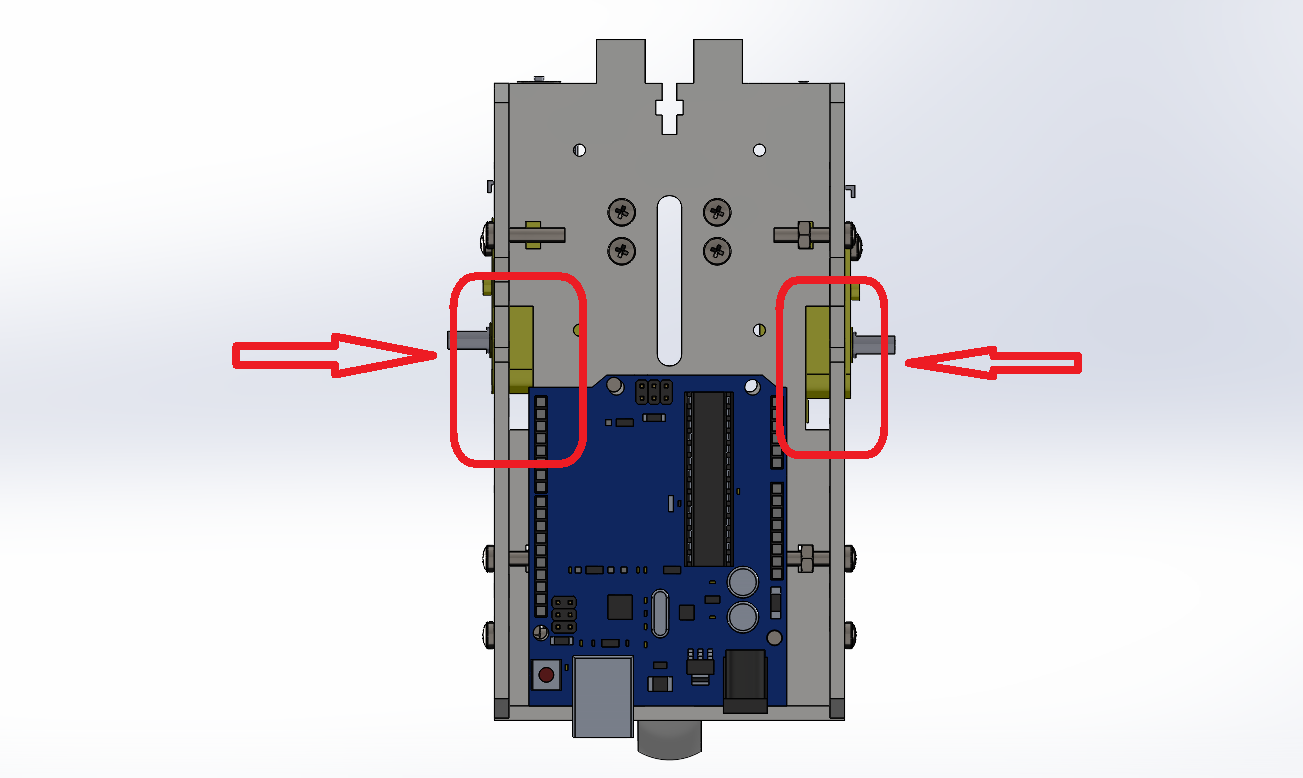
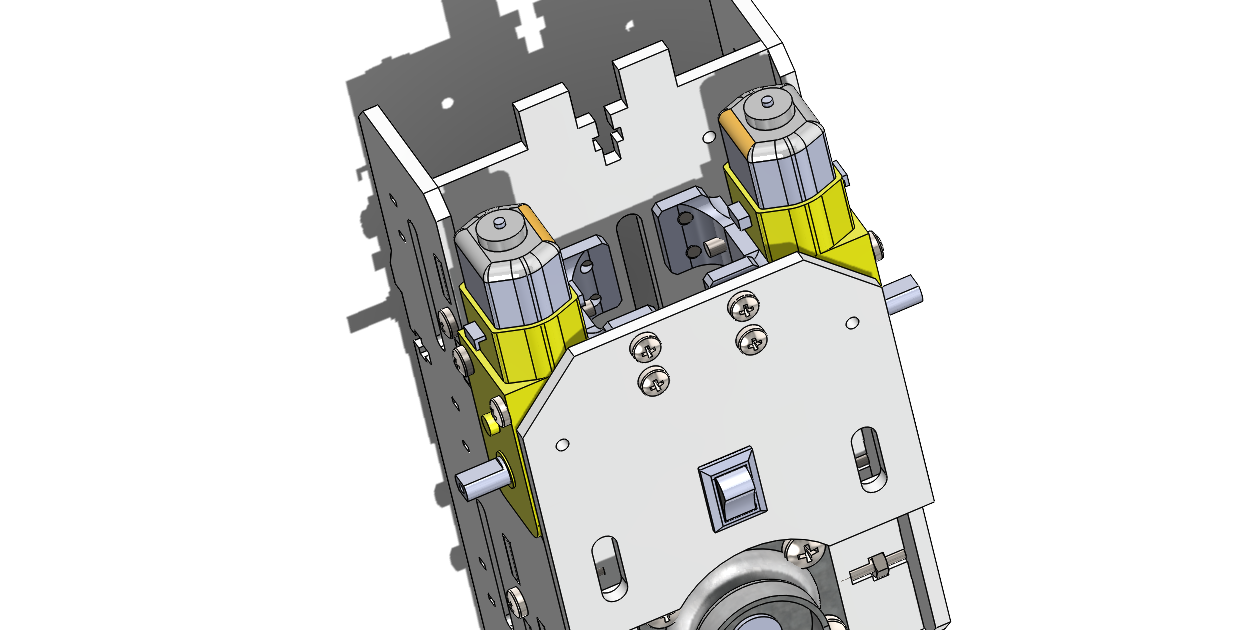
5. Instalacion soportes plasticos al chasis principal
- Teniendo cuidado de que la parte sobresaliente de cada soporte lateral esté orientada hacia arriba y que ambos soportes estén mirando hacia el interior del chasis, instalamos los dos soportes plásticos al chasis principal utilizando 4 tornillos M3 x 6 o M3 x 8. Asegúrate de ajustar con firmeza sin exceder la presión sobre el material.
- Vista Inferior de la conexion.
- Por las siguientes aberturas del chasis pueden pasar los cables de los motorreductores y del switch inferior que instalaremos más adelante. Asegúrate de dejarlas despejadas para facilitar el enrutado del cableado y evitar interferencias durante el montaje.
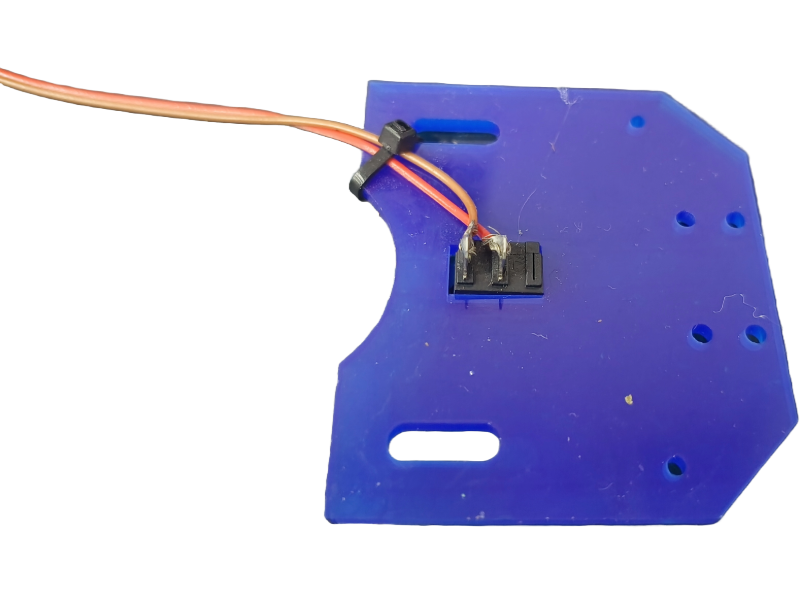
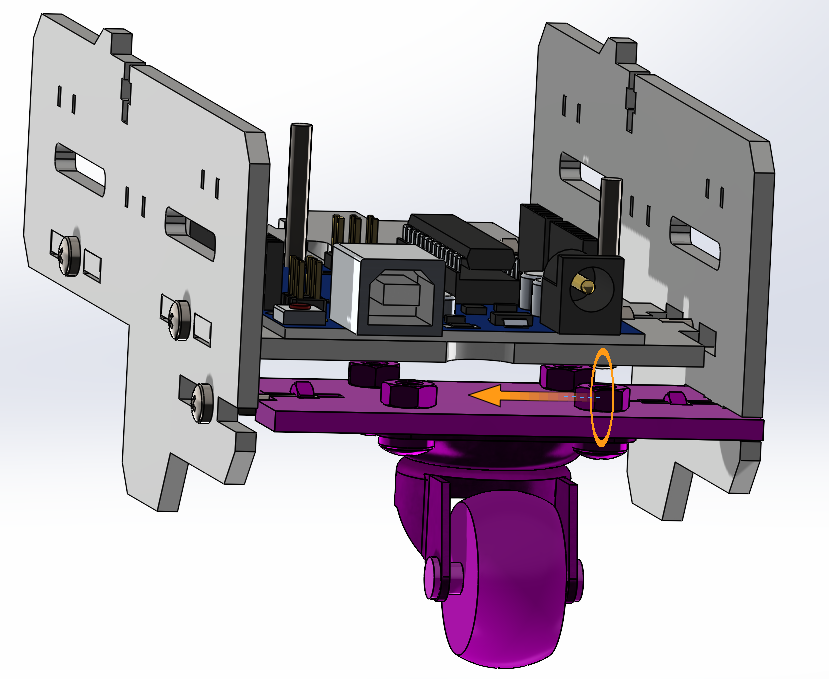
6. Instalacion Base Inferior y Switch.
- Primero instalaremos la lamina inferior en su posicion con el switch viendo hacia el centro.
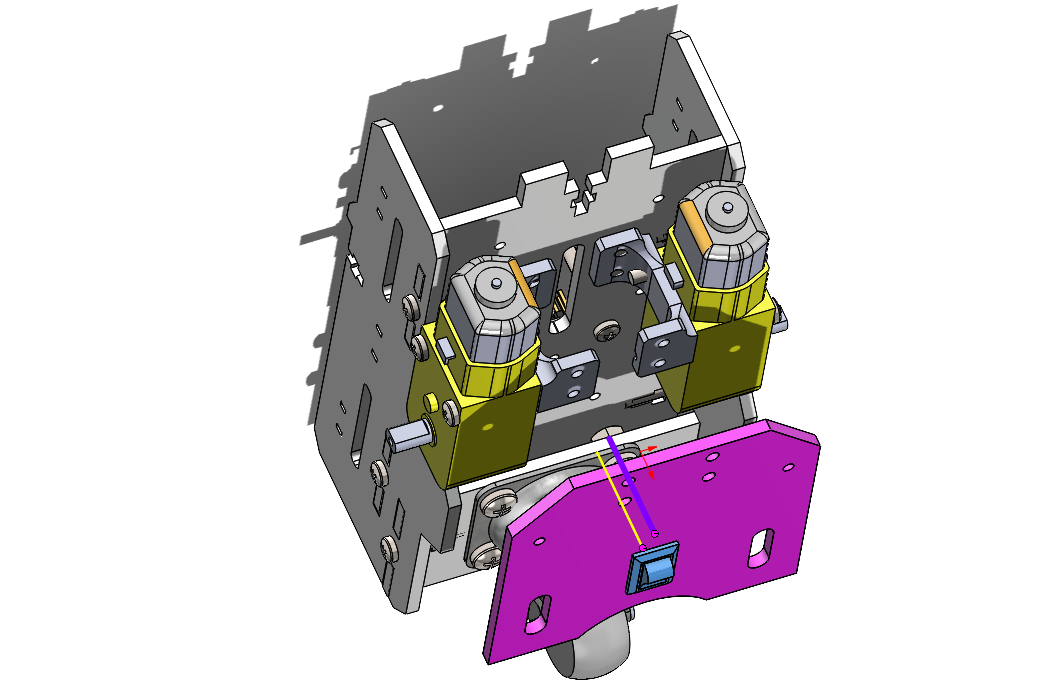
- Seguido, instalaremos 4 tornillos M3 x 6 o M3 x 8 para fijar la lámina inferior del chasis a los soportes plásticos laterales. Asegúrate de alinear bien los orificios antes de atornillar y no aplicar demasiada presión para evitar dañar el material.
- Quedando completamente conectado de la siguiente manera
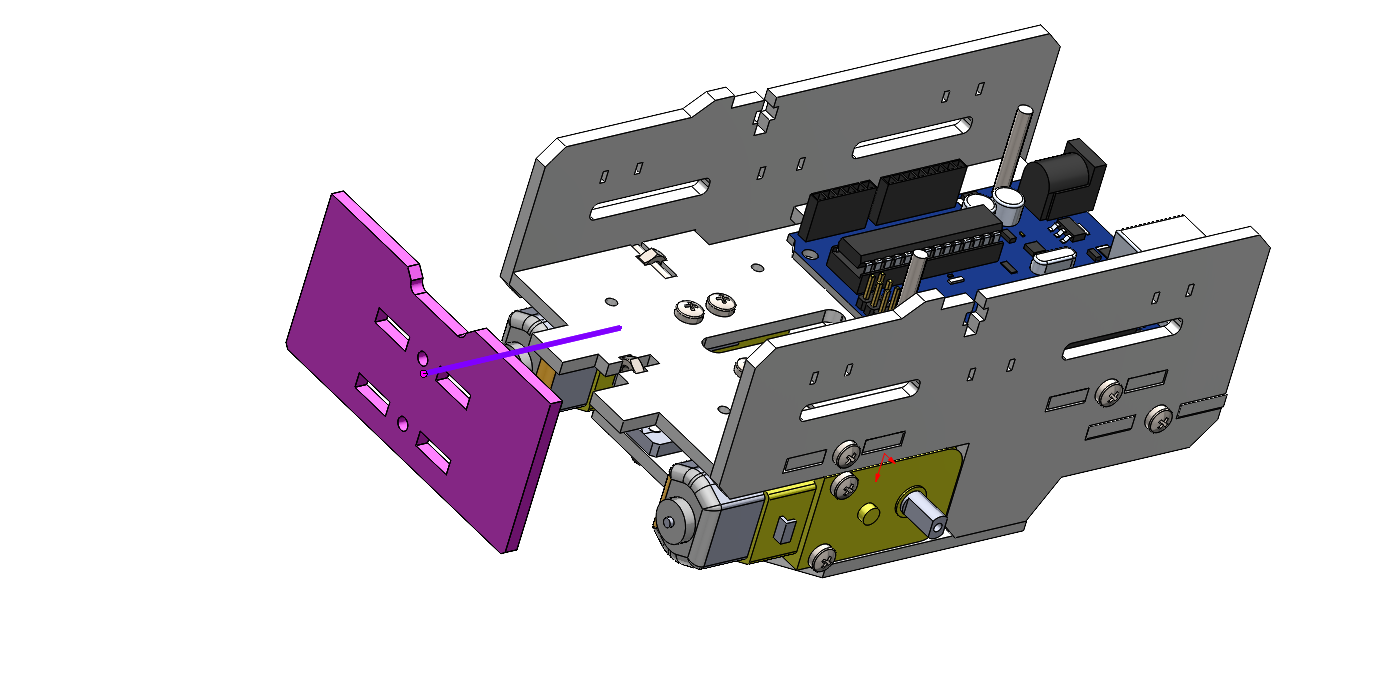
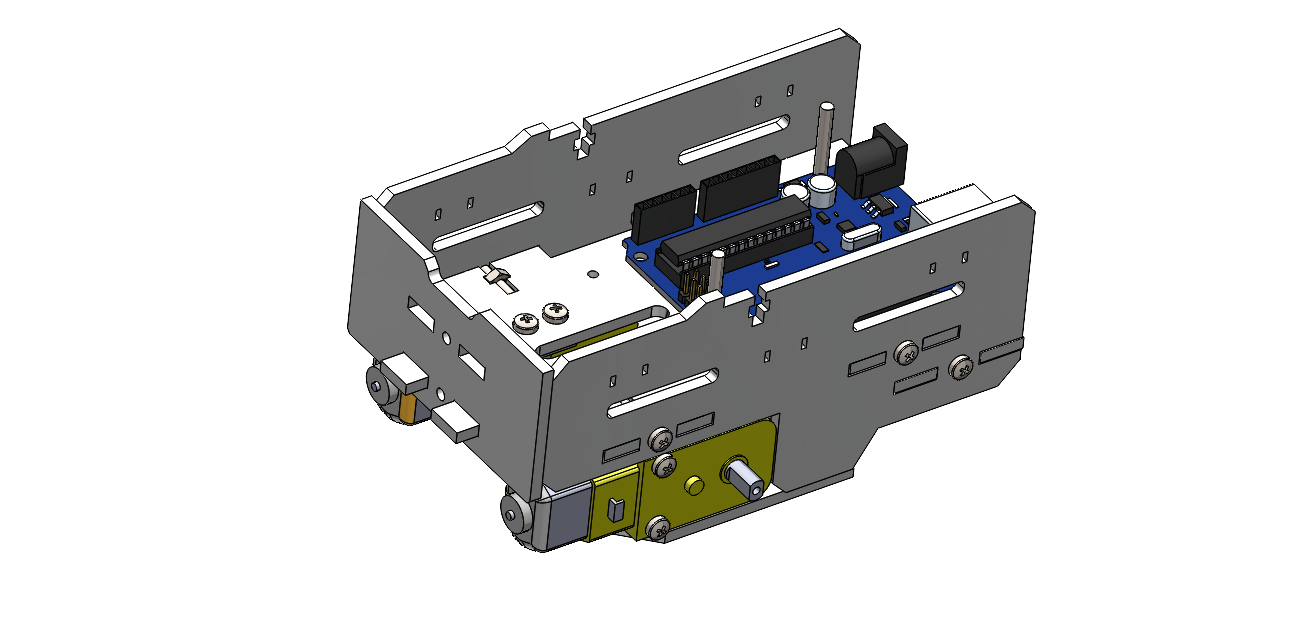
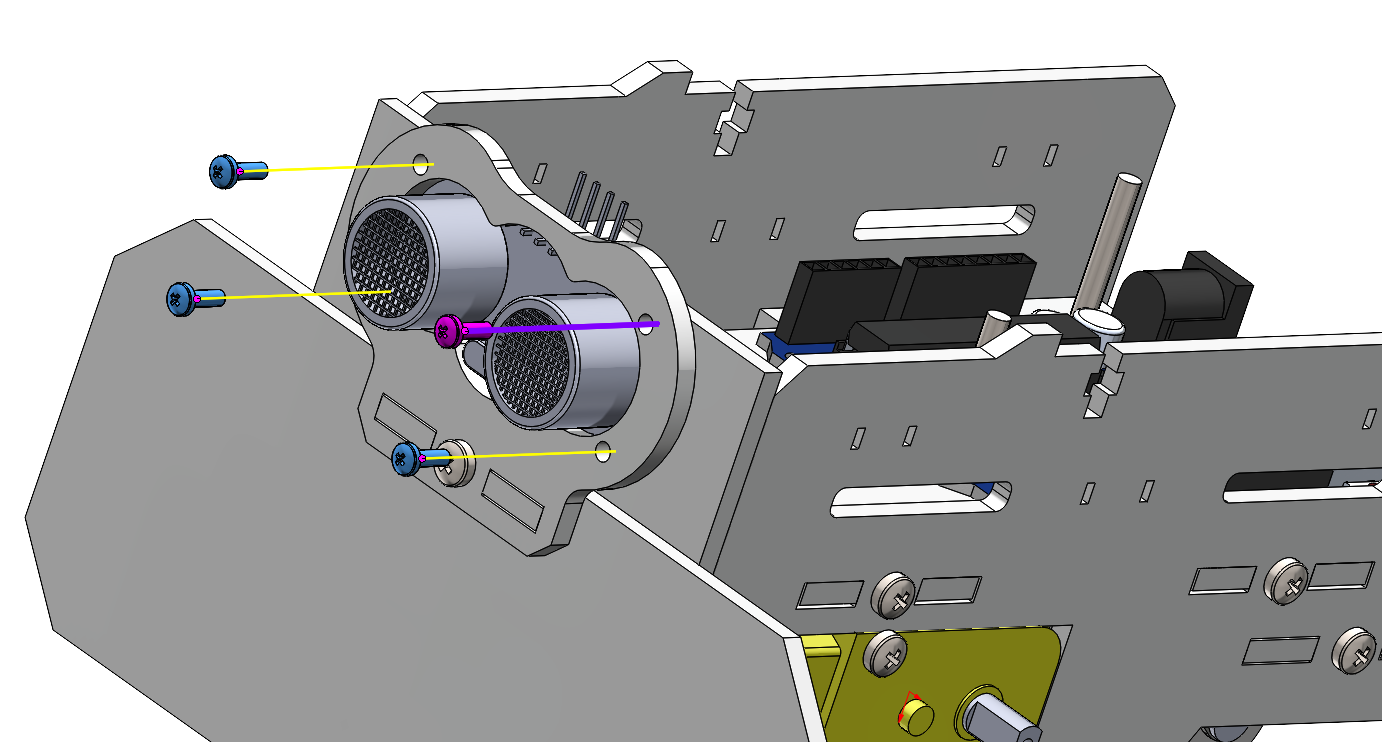
7. Instalacion Sensor Proximidad # 1
Primero instalaremos el frontal del carro robótico. Para ello, utilizaremos un pequeño trozo de cinta transparente que nos ayudará a sostener temporalmente la tuerca delantera en su lugar mientras atornillamos desde la parte exterior. Esto facilitará el montaje sin que la tuerca se desplace.
- Ahora acoplaremos el soporte delantero en su posición. Asegúrate de que la muesca esté orientada hacia la parte superior, ya que esto permitirá el paso adecuado de cables o el montaje de módulos adicionales en pasos posteriores.
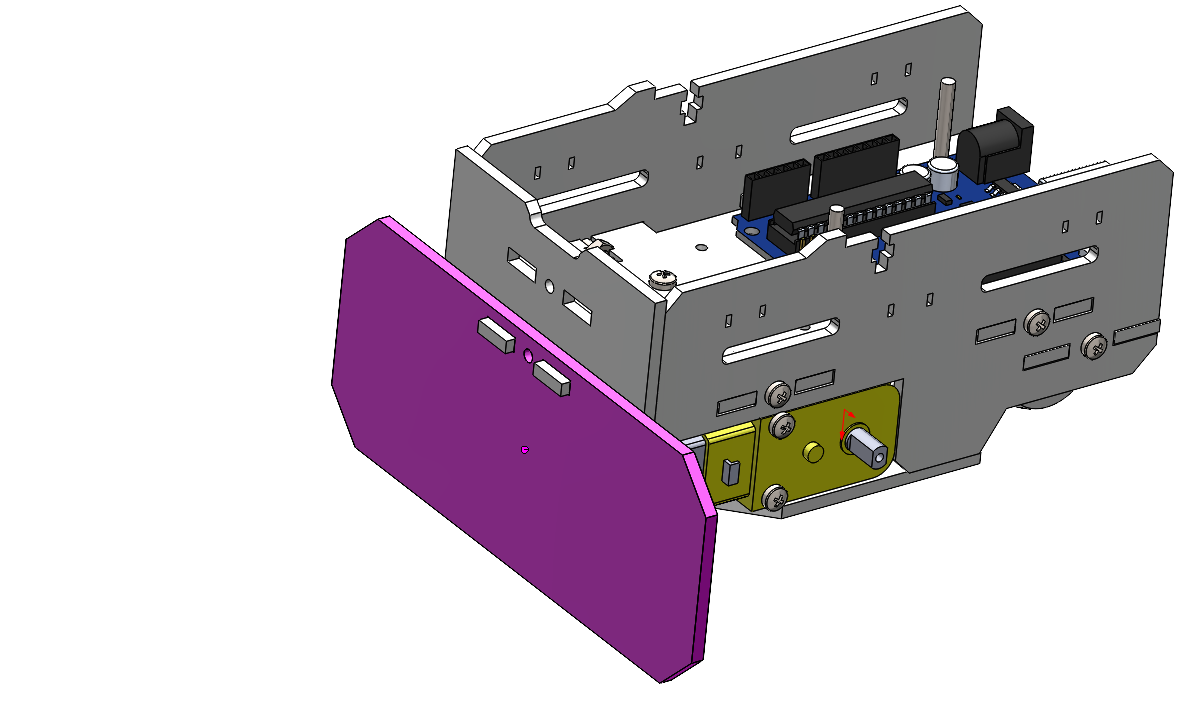
- Quedando de la siguiente forma, con el soporte frontal correctamente montado y alineado con las paredes laterales del chasis.
- Conectaremos la pala delantera en su posicion
- Ahora dejando el Sensor HC – SR04 mirando sus conectores hacia arriba, instalaremos el soporte del sensor de proximidad
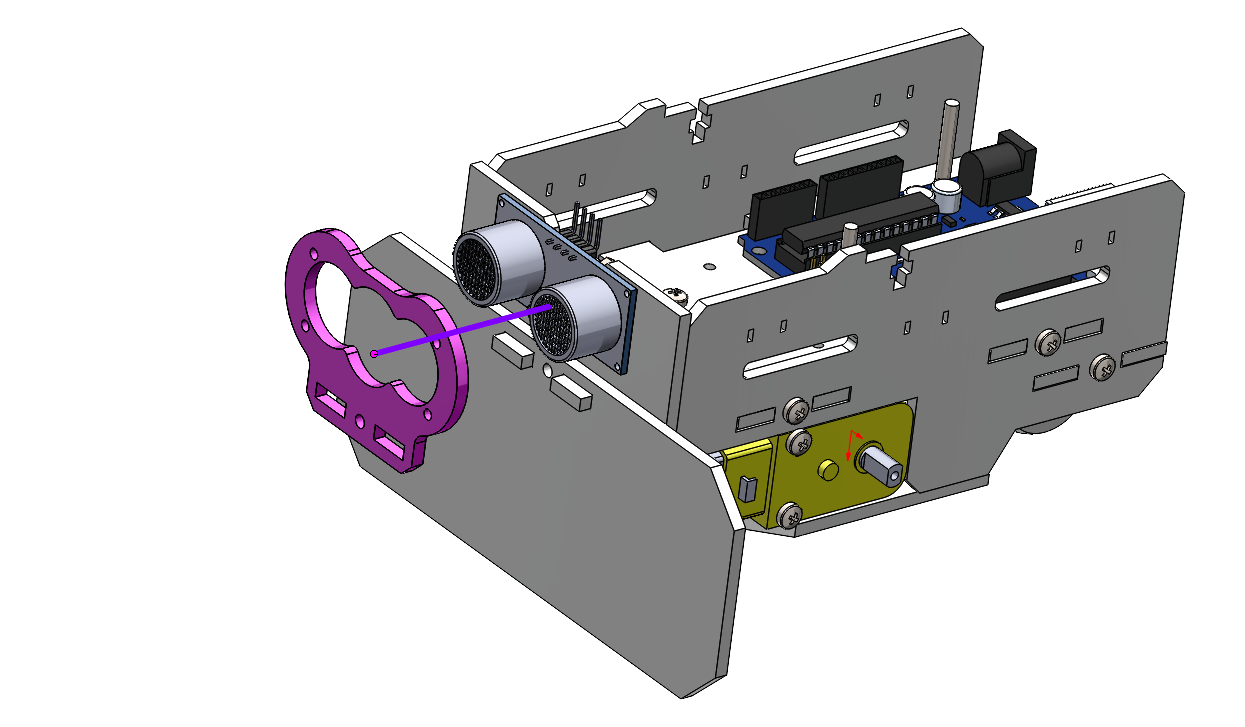
- Por ultimo atornillaremos el tornillo M3 x 16 en el hueco central ajustando todos los componentes
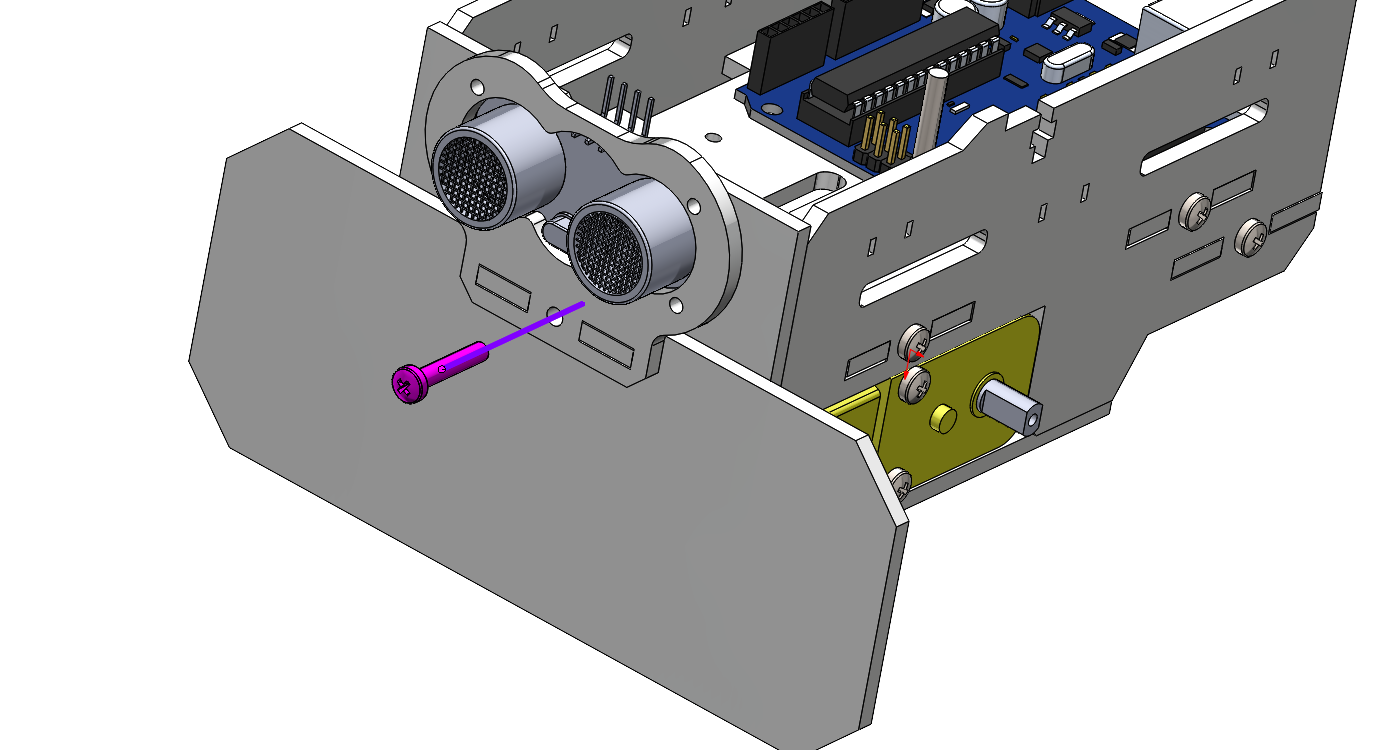
- Opcional atornilla el sensor de proximidad con los 4 tornillos autoroscantes incluidos
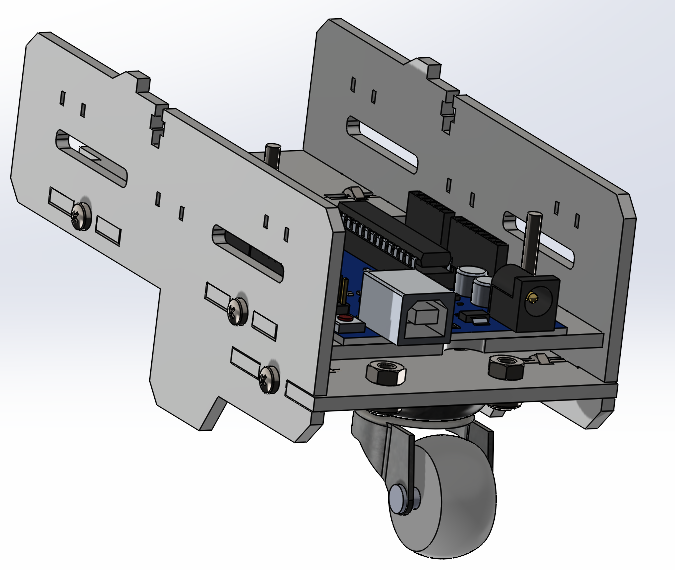
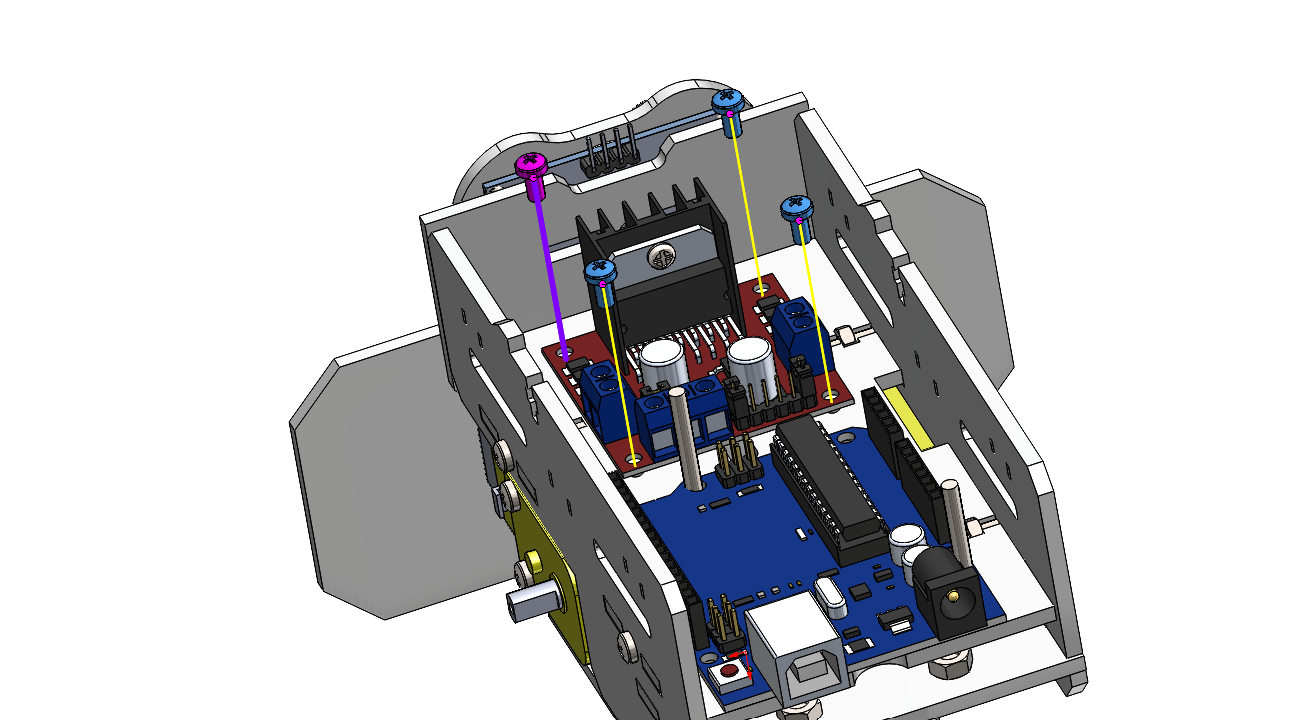
8. Instalación del módulo controlador de motores
⚠️ Precaución al instalar el módulo puente H
Antes de fijar el módulo puente H al chasis con tornillos, asegúrate de que todas sus conexiones estén correctamente realizadas y que el módulo haya sido probado.
Esto evitará desmontajes innecesarios si se detecta algún fallo o mala conexión.
- Pega un trozo de cinta doble faz cubriendo los 4 tornillos superiores de la plataforma principal
- Instala el módulo puente H L298N sobre la cinta doble faz previamente adherida al chasis, asegurándote de que el radiador del puente H quede orientado hacia la lámina frontal del robot. Presiona ligeramente para fijarlo sin dañar los componentes, y luego atornilla con 4 tornillos M3 x 6 o M3 x 8 para asegurar completamente el módulo a la base.
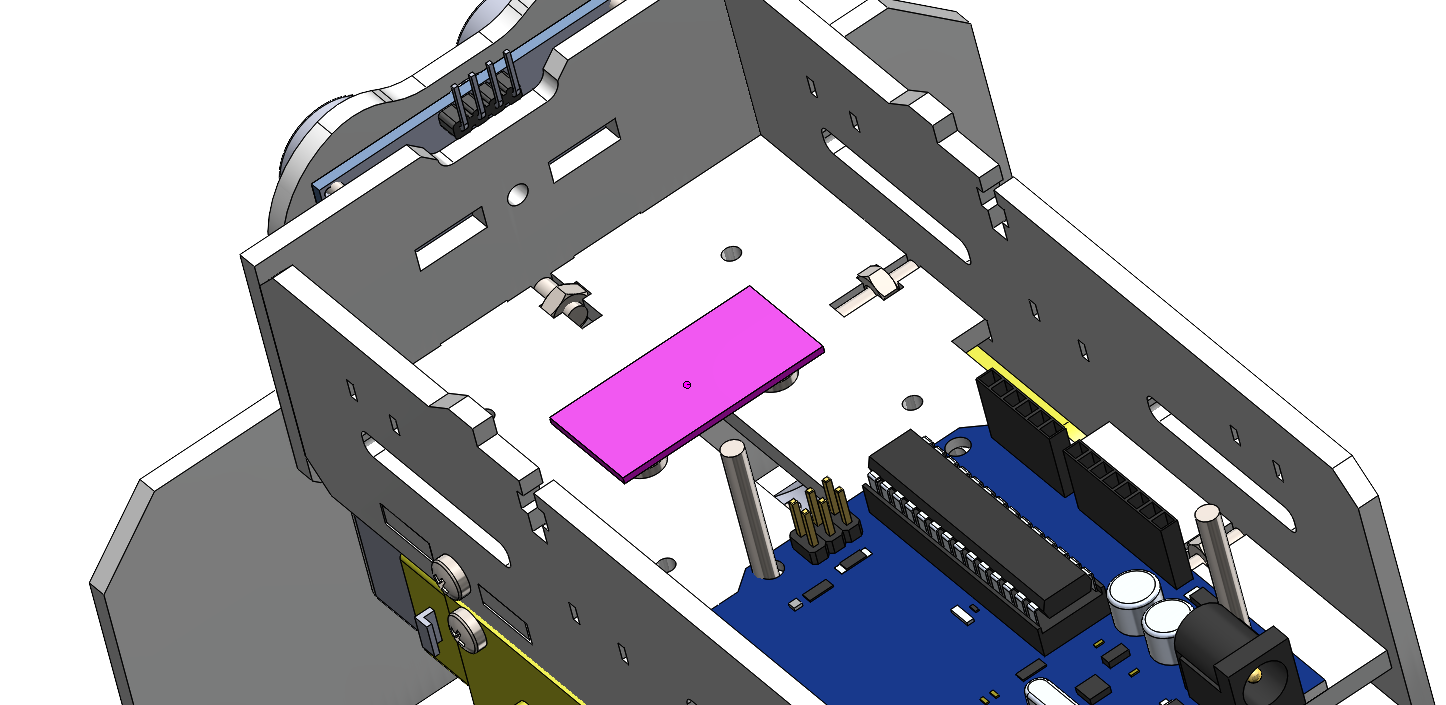
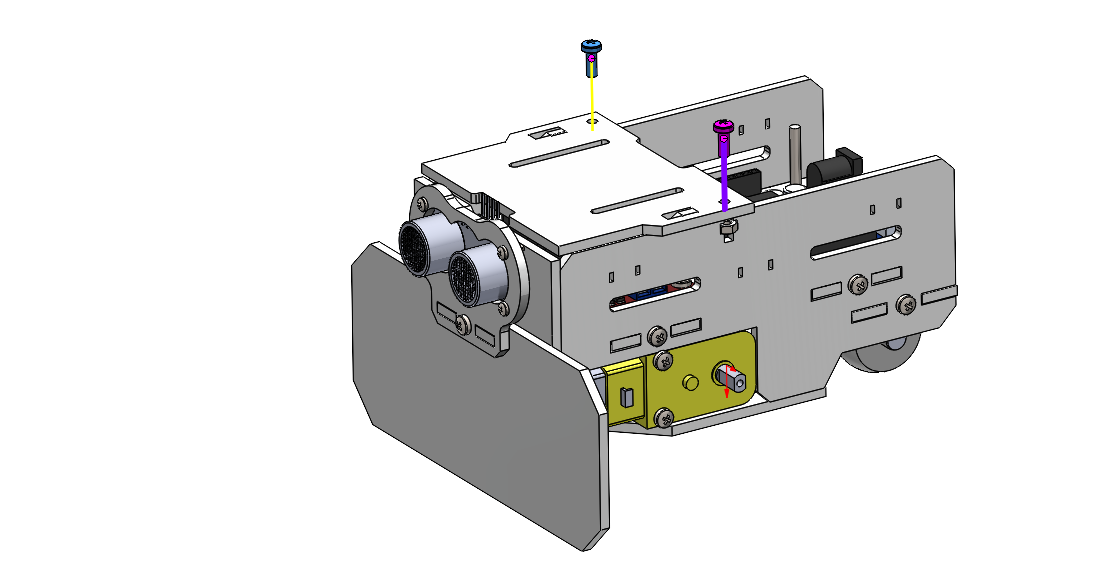
9. Instalacion Soporte Portapilas x 4 AA
- Instala el soporte superior destinado al portapilas, alineándolo con los orificios del chasis. Asegúrate de que quede centrado y firme, ya que sostendrá la fuente de energía del robot en la parte superior de la estructura.
- Inserta dos tornillos M3 x 12 en los orificios laterales del soporte superior. Recuerda colocar previamente dos tuercas M3 en los huecos inferiores laterales de los soportes del chasis, ya que allí se enroscarán los tornillos para asegurar firmemente la estructura.
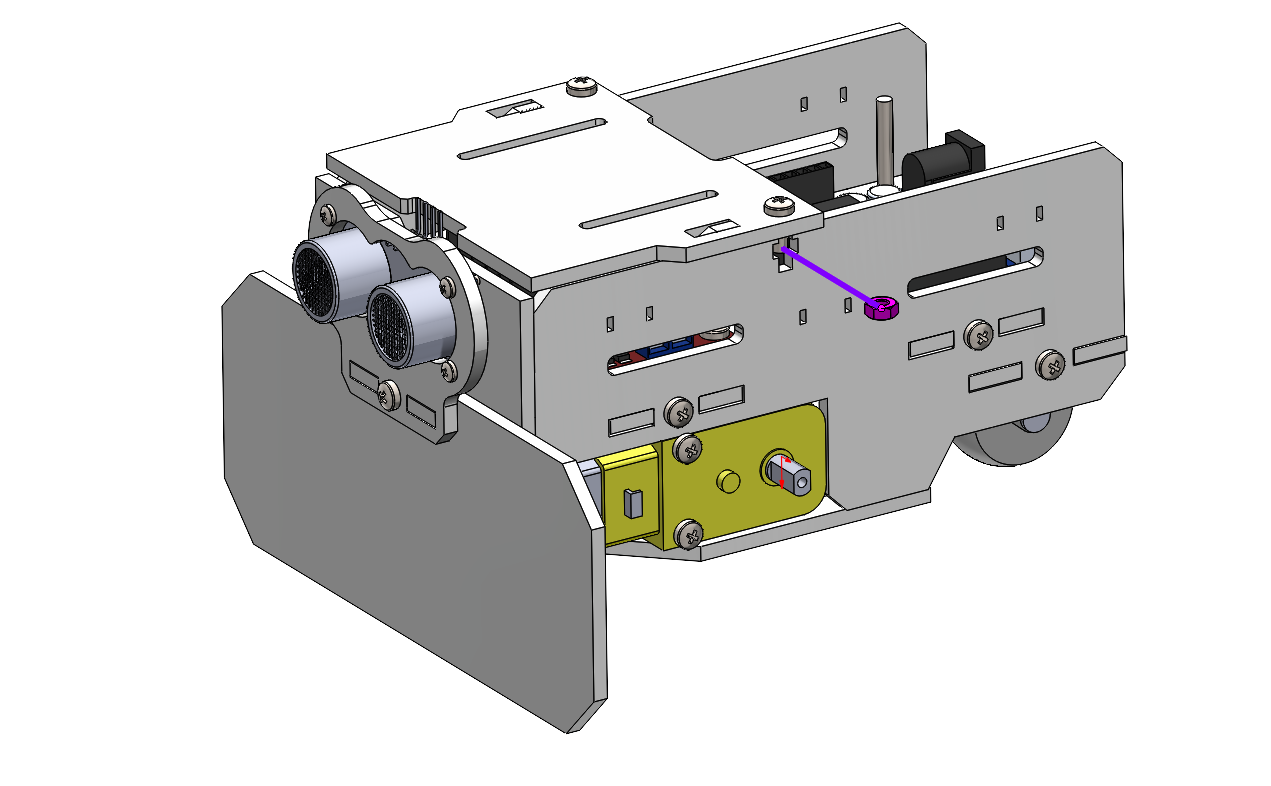
- Instalacion tornillos M3 x 12
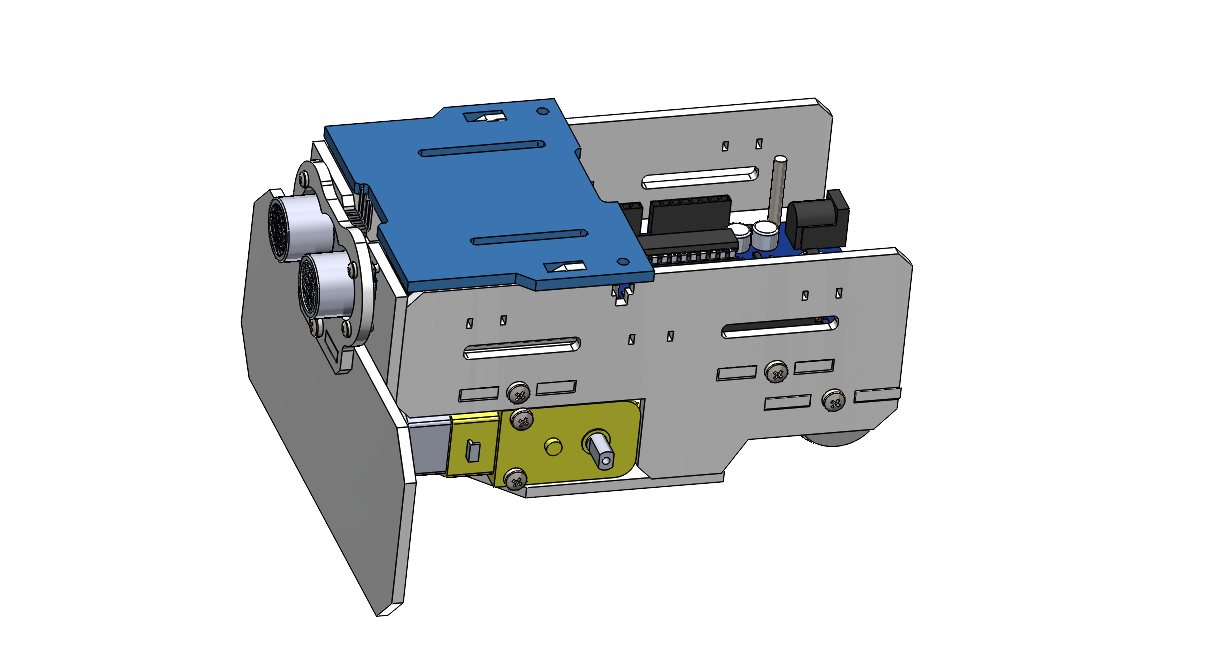
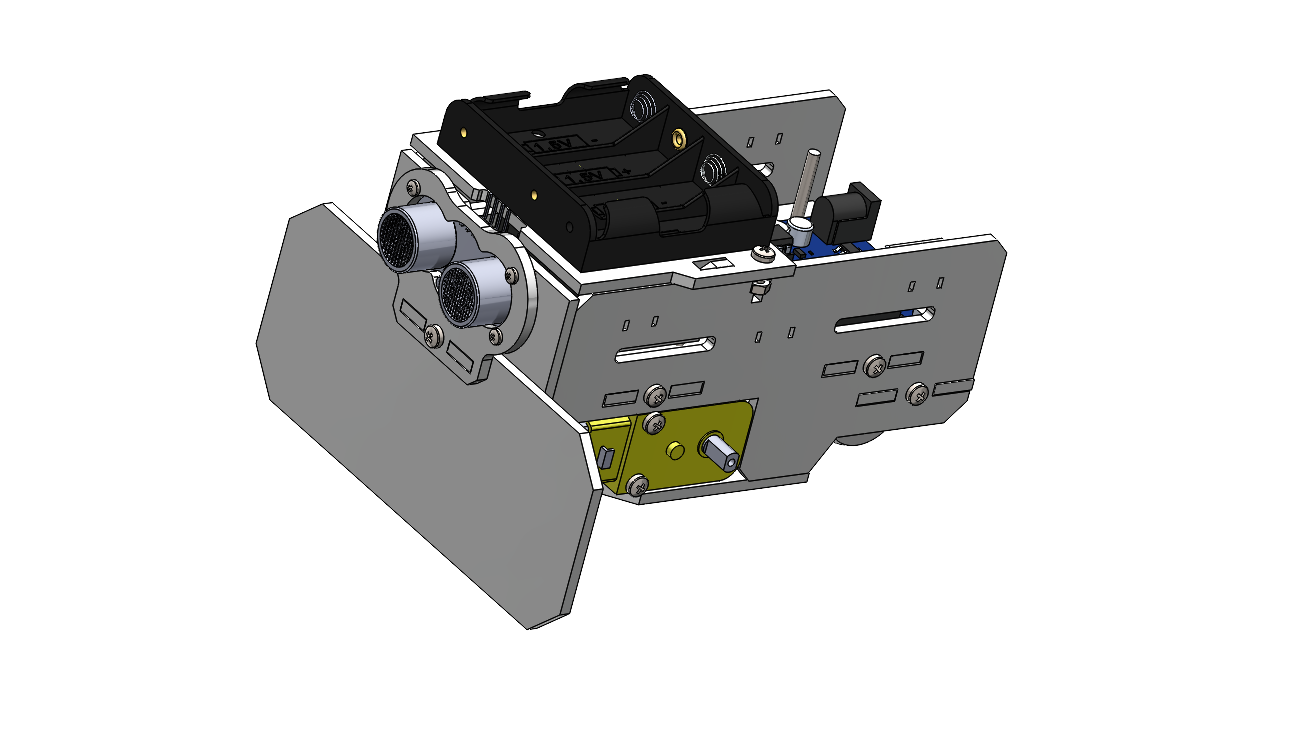
- Pega dos tiras de cinta doble faz sobre la superficie del soporte del portabaterías para asegurar una fijación firme y estable.
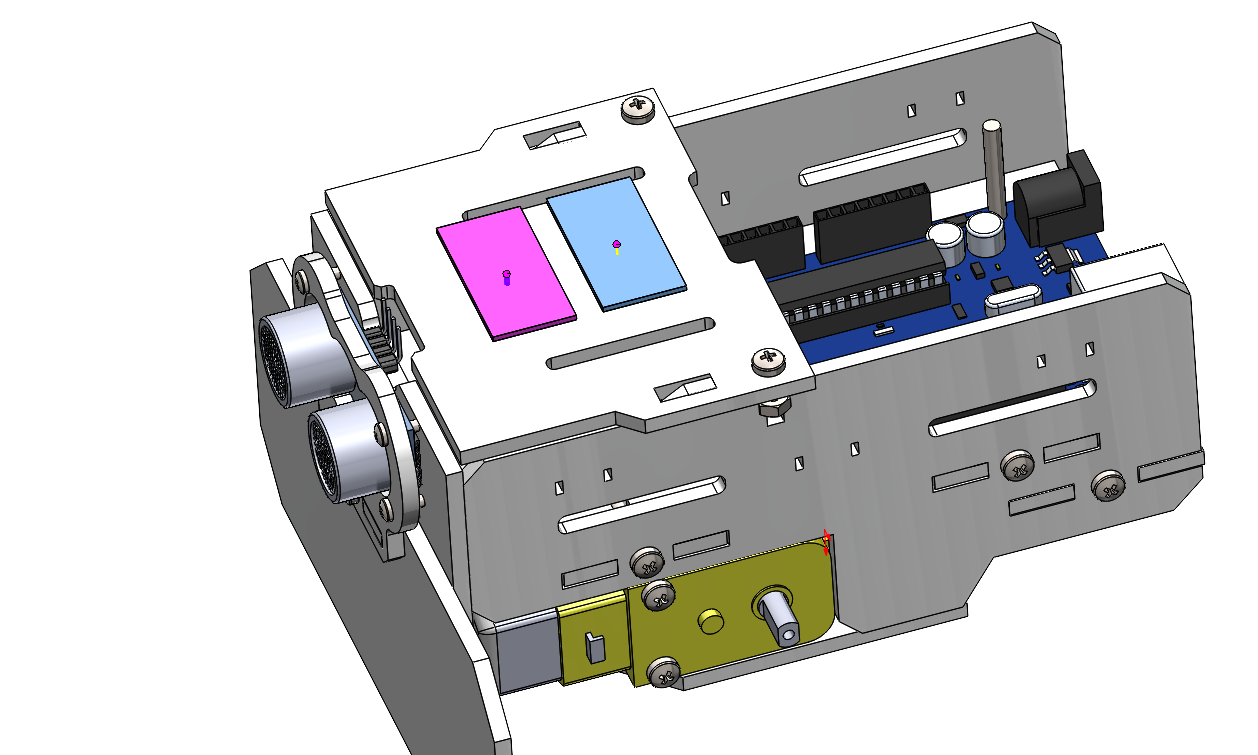
- Instala el portapilas en su parte superior
11. Llantas Motorreductor
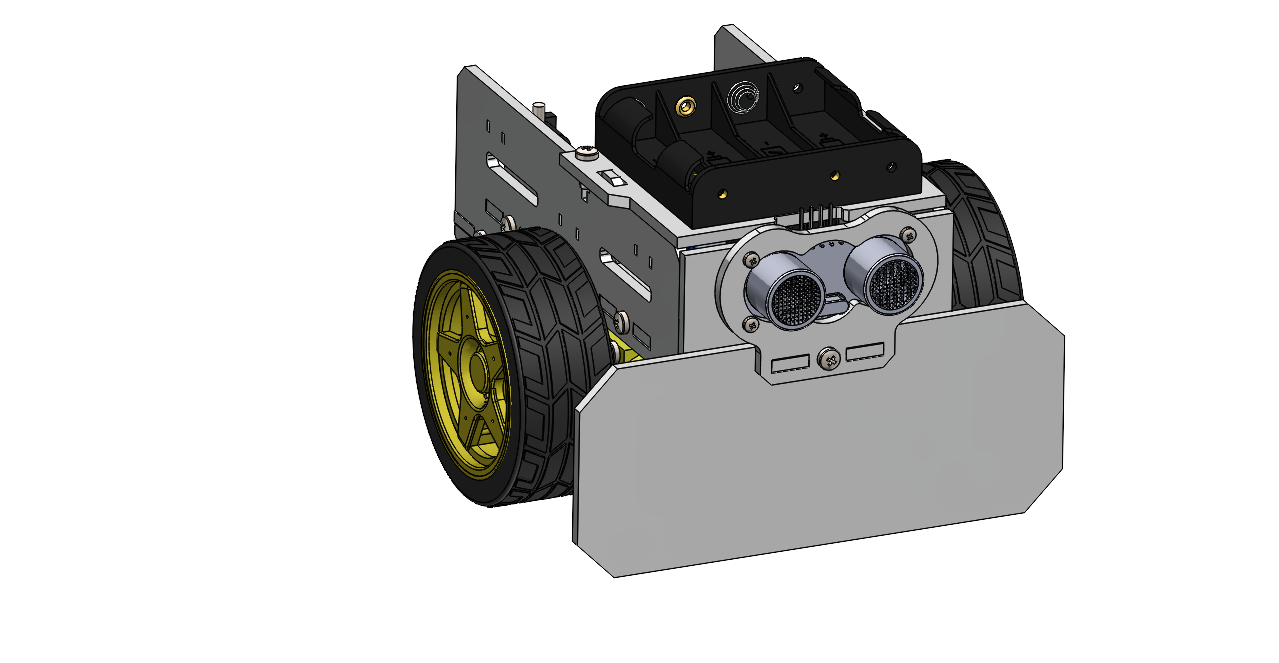
Para finalizar Instalaremos las llantas del Carro Robotico MultiCarBot.
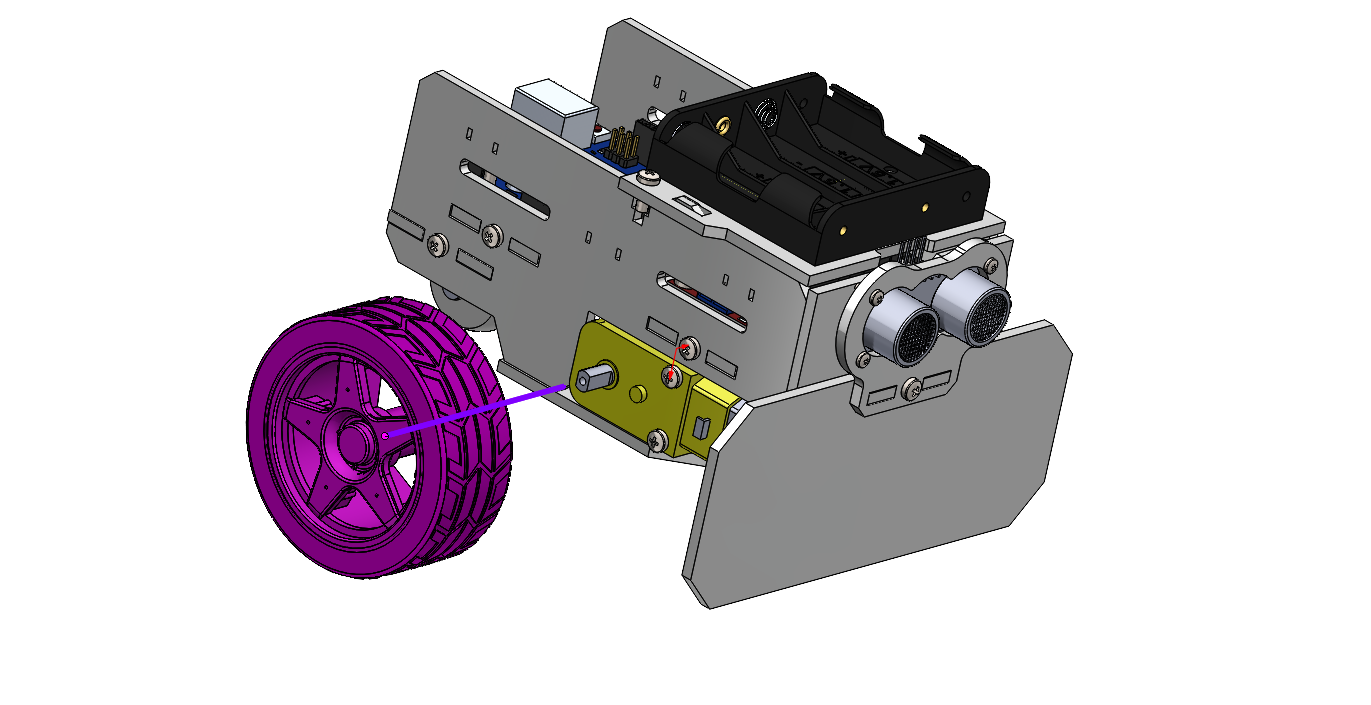
Con esto finalizamos el proceso de ensamblaje del MultiCarBot. Si seguiste cada paso con atención, ahora cuentas con una estructura sólida, bien organizada y lista para entrar en acción. A partir de aquí, el siguiente reto será dar vida a tu robot a través de la programación y las primeras pruebas de movimiento. ¡Prepárate para ver en acción lo que tú mismo construiste!
Contáctanos
Carrera 81C Sur #55-39
Bogotá D.C. – Colombia

Copyright 2025 © Robotica de Colombia



- Image
- SKU
- Rating
- Price
- Stock
- Availability
- Add to cart
- Description
- Content
- Weight
- Dimensions
- Additional information