¿ Como controlar un Servomotor con Snap4Arduino ?
En esta guia completa aprenderas como mover un servomotor con el programa Snap4Arduino, es una forma muy sencilla y entretenida de aprender a manejar estructuras roboticas que te podrian parecer muy complejas, como por ejemplo alguno de nuestros Brazos roboticos.
Materiales:
- Servomotor Sg90.

Servomotor-Sg90
- Arduino Arduino Uno

Arduino uno
- Jumpers

Jumpers
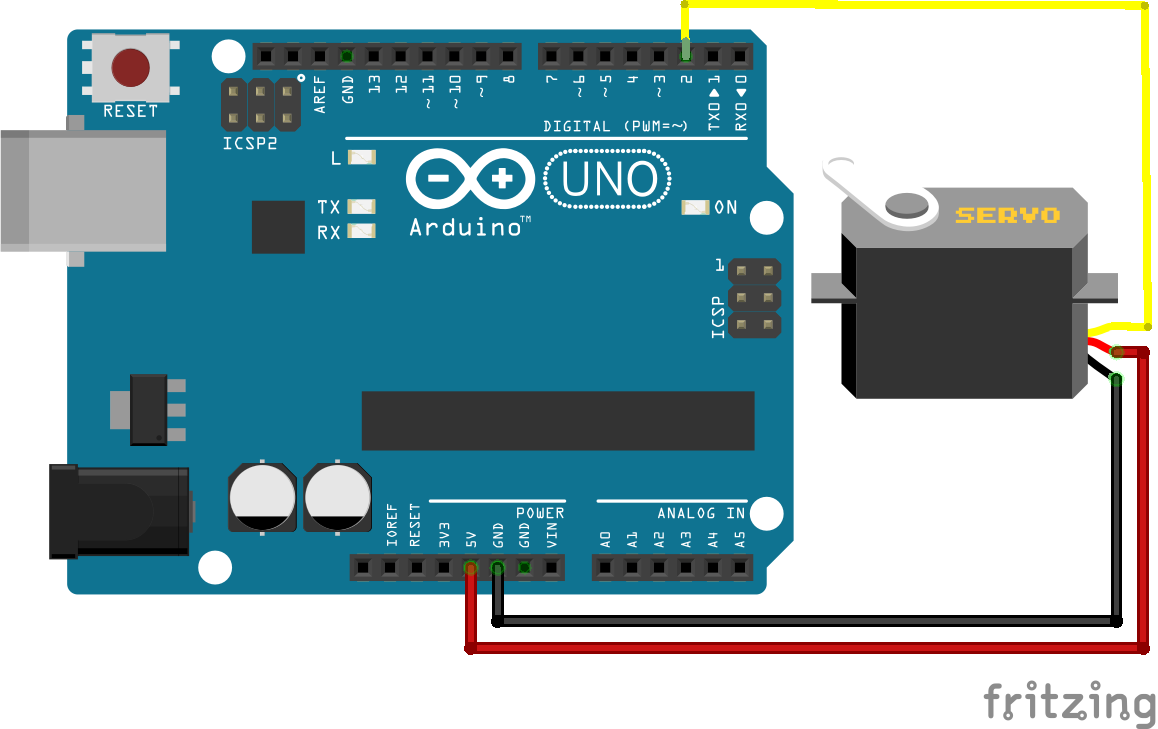
CONEXIONES
Esta es la conexion que recomendamos realizar, es sencilla.

CODIGO:
El Programa Snap4Arduino necesita la libreria StandarFirmata, la cual puedes encontrar en los ejemplos del IDE de Arduino, a continuacion da click en el siguiente enlace para poder acceder a un pequeño tutorial donde te enseñamos a encontrar y cargar la libreria firmata en tu arduino.
Cargar Libreria StandardFirmata a Arduino
Configurar Snap4Arduino
- Abre Snap4Arduino, si no sabes como cargar Snap4Arduino aqui te enseñamos.

- Da click en la pestaña Arduino del programa.

- Conecta tu arduino al pc a travez del cable Azul incluido en tu compra.
- Da click en conectar.

conexion arduino
Podras obserjvar un mensaje si la conexion fue satisfactoria.

- Desde la bandeja control seleccionas y arrastras al panel objetos «Al Presionar Una Tecla» y escoges «flecha Derecha«.

- En la bandeja Arduino escoger el bloque «Fijar Servo», luego arrastrarlo y soltarlo justo debajo el bloque «Al Presionar Tecla».

- En el Bloque «Fijar Servo» se escoge en la primera opcion desplegable el numero 2 y en la segunda opcion desplegable se escoge «Angulo (0-180)» despues se escribe en esa misma casilla el angulo deseado, para este ejemplo escribiremos el numero 90 para que el servomotor cuando presionemos la tecla flecha izquierda de nuestro teclado se mueva al angulo 90º.

- Por ultimo repetimos el proceso del paso 5, 6 y 7 con angulos aleatorios tres veces mas para asi tener 4 opciones de movimiento cubriendo las flechas arriba, abajo, izquierda y derecha, en la siguiente imagen se ilustra el resultado final.

- Para finalizar debes presionar las teclas «flecha izquierda, derecha, arriba y abajo» y podras observar como tu servomotores se estara moviendo acordemente a los angulos que definiste.
Esperamos que esta guia te sea de mucha ayuda, cualquier duda no dudes en plantearla en la caja de comentarios.
Contáctanos
Carrera 81C Sur #55-39
Bogotá D.C. – Colombia

Copyright 2025 © Robotica de Colombia



- Image
- SKU
- Rating
- Price
- Stock
- Availability
- Add to cart
- Description
- Content
- Weight
- Dimensions
- Additional information